JavaScriptが無効になっています。
このWebサイトの全ての機能を利用するためにはJavaScriptを有効にする必要があります。
- Interview
- インタビュー
伝統と革新を乗せ、宇宙と未来に挑む国産固体ロケット「イプシロン」
- 井元 隆行
- イプシロンロケット
プロジェクト・マネージャー
- 広瀬 健一
- イプシロンロケット
プロジェクトチーム - 主任研究開発員
(自動・自律点検システム担当)
- 岡田 修平
- イプシロンロケット
プロジェクトチーム - 研究開発員
(アビオニクス担当)
- 2021.07.07

日本の主力ロケットのひとつとして活躍中の「イプシロン」。日本が長年育んできた、世界トップレベルの固体ロケット技術の伝統を受け継ぎ、そこに新たな技術を投じたことで、高性能かつ使いやすい、新世代のロケットとして誕生した。2013年の試験機打ち上げ以来、これまでに4機が打ち上げられ、2021年度中には5号機の打ち上げが迫る。さらに現在は、より発展した「イプシロンS」の開発も進んでいる。

- 2013年に打ち上げられたイプシロン・ロケットの試験機
- ©JAXA
はたしてイプシロンとはどんなロケットなのだろうか。従来のロケットからどのような進歩を遂げ、さらにイプシロンSでどんな姿に発展しようとしているのだろうか。
その全貌について、イプシロンのプロジェクト・マネージャーを務める井元隆行さん、イプシロンを打ち上げる地上設備の開発や整備を担当する広瀬健一さん、そしてイプシロンに搭載されている電子機器(アビオニクス)を担当する岡田修平さんの3人に、詳しくお話を伺った。
(インタビュー・文/鳥嶋 真也 撮影/氏家 岳寛〈アマナ〉)

イプシロンってどんなロケット?
── はじめに、プロジェクト・マネージャーの井元さんから、イプシロンとはどんなロケットなのかについて教えてください。
井元 ── イプシロンは新世代の固体燃料ロケット*1で、主に小型の衛星を打ち上げることを目的としています。これまでに4機を打ち上げ、2021年度中には5号機の打ち上げも予定しています。
開発に向けた検討が始まった2006年当時は「次期固体ロケット」と呼ばれており、私はそのころから研究、開発に携わっています。2017年4月からはプロジェクト・マネージャーを務め、現在はさらに発展した「イプシロンS」の開発も行っています。
イプシロンは2013年に試験機の打ち上げに成功し、その後「強化型イプシロン」の開発を行い、2016年に打ち上げられた2号機から投入、本格的な運用段階に入りました。この強化型の開発により、従来運用していた小型固体ロケット「M-V」*2ロケットに比べ、大きく4つの点で進歩を遂げました。
1つ目は「コンパクトな打ち上げシステム」です。M-Vまでは、ロケットの搭載機器一つひとつに対応する形で地上設備があったのですが、パソコンレベルの装置で管制が行えるようにしたことで、打ち上げに関わるオペレーターの人数を減らし、システムをコンパクトにすることができました。
2つ目は「高い軌道投入精度」です。お客さんである人工衛星を、所望の軌道に正確に投入できるようにしました。3つ目は「世界トップレベルの衛星搭載環境」。打ち上げ時にかかる振動や音、衝撃などを世界トップレベルまでに抑えました。そして4つ目は「複数衛星同時打ち上げ」で、多種多様な衛星を一度に複数機打ち上げることができるようになりました(図1)。
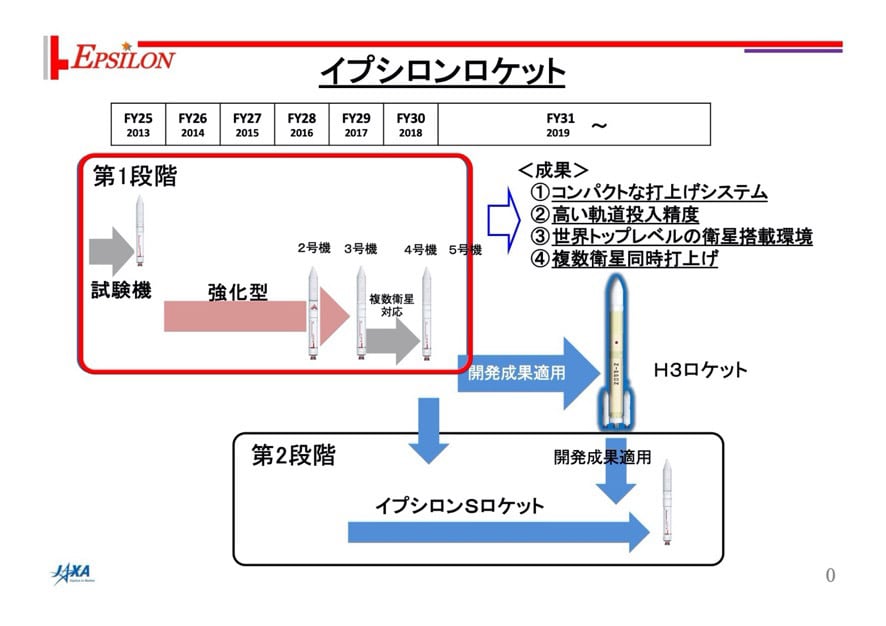
- [図1]イプシロンの発展の経緯と成果、今後の計画
- ©JAXA
── 続いて、広瀬さんからイプシロンの地上設備について教えてください。
広瀬 ── 私は2011年からイプシロン・プロジェクトに携わっており、主に射点(ロケットを発射する場所)の設備などの地上設備の開発整備、維持を担当しています。
先ほど井元さんから話のあった「コンパクトな打ち上げシステム」について、もう少し詳しく説明しましょう。
M-Vまでは、ロケットの搭載機器一つひとつに、地上側に点検装置を置いていました。それぞれが同じ数だけあるので、とても複雑なものになっていたのです。これをイプシロンでは、ロケットの中に「即応型運用支援装置(ROSE、Responsive Operation Support Equipment)」という新開発の装置を搭載し、搭載機器のデータをすべて、いったんROSEに集約したうえで、地上側にある「発射管制設備(LCS、Launch Control System)」という装置にイーサネット一本で伝送し、LCSだけで機体の監視や整備を行うことができるようにしました(図2)。
さらに、LCSをネットワークにつなぐことで、射場作業の進捗状況、機体の状態を示すテレメトリーという信号のデータをJAXAの事業所や、機体のメーカーに配信できるようにし、技術者が射場まで移動することなく、技術判断や評価が行えるようにしました。
M-Vは点検装置ごとに技術者がつきっきりになっていたため、打ち上げに関わるオペレーターの数も約60人必要でしたが、イプシロンでは6人だけとなり、10分の1にまで減らすことができました。さらに、作業にかかる期間も、M-Vと比べて短くすることができました。今後も作業の精査・効率化などを進めていき、将来的には1週間を目指していきたいです。
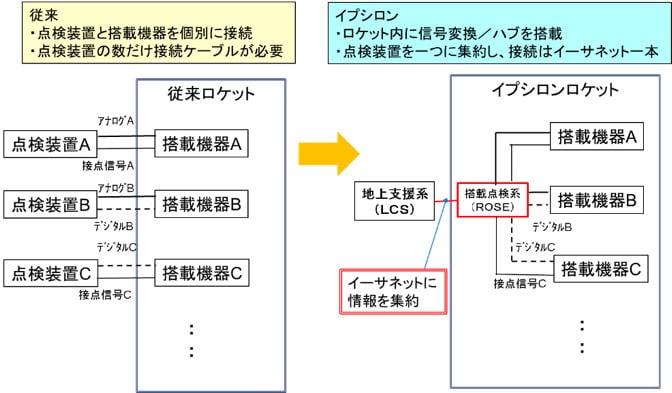
- [図2]従来のロケットとイプシロンとの、搭載点検系の違い
- イプシロンでは非常にコンパクト、簡素化されたことがわかる ©JAXA
── 続いて、岡田さんからイプシロンのアビオニクスについて教えてください。
岡田 ── 私はもともと種子島宇宙センターで、電気の地上設備の維持を担当していましたが、イプシロンの試験機の打ち上げ後にプロジェクトに加わり、機体に搭載される計算機や送信機、電力分配器など、電子機器全般――アビオニクスの取りまとめを担当しています。
イプシロンのアビオニクスの一部には、大型ロケット「H-IIA」のものと共通しているところがあります。数でいうと、全搭載機器中の半分強です。既存のロケットから部品や技術を活用し、また同じ部品を2つのロケットに使うことで、コストダウンや開発期間の短縮、技術の共通化を図っています。
また、ロケットに搭載している電池から電気を分配するための「電力分配器(PSDB)」という機器があるのですが、その電力分配器のスイッチに、M-Vやイプシロン試験機では機械式リレーを使っていましたが、強化型イプシロンでは半導体スイッチに改良しました。これにより、従来は質量が約20kgもあったものを、約10kgと半分に減らすことができ、その分打ち上げられる衛星の質量を増やすことができました。
── 2021年度中に打ち上げ予定のイプシロン5号機について教えてください。
井元 ── 現在はロケット機体の製造を進めており、もうすぐ機体の大部分を内之浦宇宙空間観測所に搬入する予定です。
イプシロン4号機では7機の小型衛星を一度に打ち上げましたが、5号機では9機の小型衛星を打ち上げます(図3)。そのため、衛星搭載部の構造、電気系を少し改修しています。今後の打ち上げでも、衛星の搭載数や、それぞれの大きさ、質量などは毎回変わっていくと思いますが、衛星搭載部はその都度、ミッションに合わせて進化していくことになると思います。
イプシロン5号機に搭載する衛星については、現在試験の真っ只中にあります。
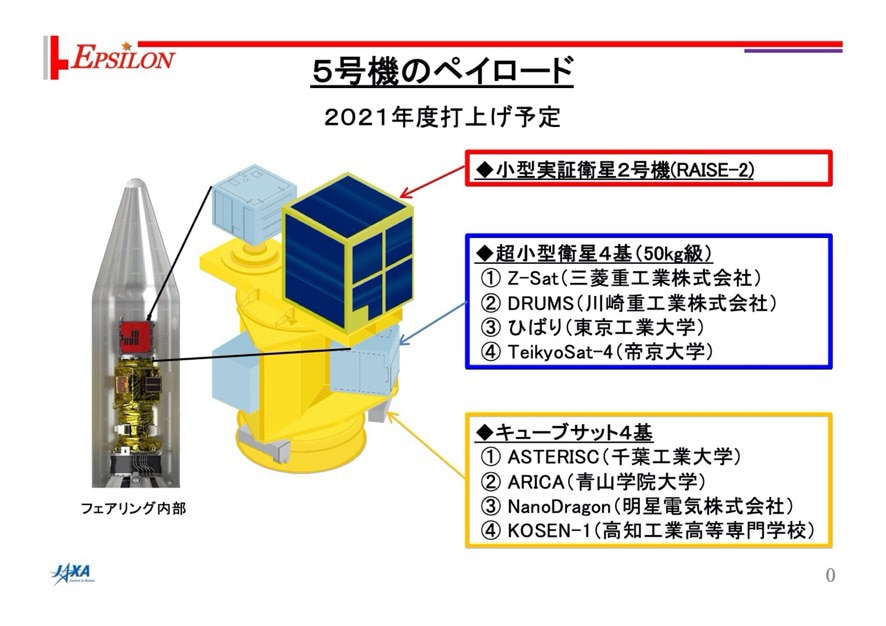
- [図3]イプシロン5号機に搭載される衛星
- イプシロンにとって最多となる9機もの衛星を搭載し打ち上げる ©JAXA

ロケットと人工知能(AI)
── イプシロンというと、よく「人工知能(AI)」で点検していると言われることがありますが、その実態について教えてください。
広瀬 ── いわゆるイプシロンのAIと呼ばれているものには、「自動点検」と「自律点検」があります。
このうち自動点検については、地上設備で確立し、導入しています。自動点検というのは、ある基準に合わせて、その上限、下限のしきい値を超えたときに「異常」と判定するというものです。
一方で、AIを使った自律点検というのは、「基準(しきい値)内には入っているのだけど、数字の出方がちょっとおかしい」といった、問題の兆候のようなものまで抽出し、判定しようというものです。従来は技術者が見て判断していたものを、機械にやらせようとしたのです。
岡田 ── しかし、それを行うためには、その判定の基準となるデータ、たとえば「機器の電源を入れたときに電圧がどんな感じで立ち上がるのか、何秒で立ち上がるのか、どれくらいでオーバーシュート(定常値を超えること)するのか」といったデータが必要です。そのためには、同じ構成のロケットを何機も打ち上げて、大量のデータを集め、それをもとにデータベースを作る必要があります。
しかし、先ほど述べたように、イプシロンはまず試験機を開発したあとに、強化型を開発したので、機体の構成が変わってしまいました。そのため、試験機のデータと強化型のデータを同じものとして扱うことが難しくなりました。また、同じ強化型でも、ロケットの先端に、衛星を精密に軌道に投入するための「PBS」という小さなロケット段を搭載している号機としていない号機があります。さらに4号機では、複数の衛星を打ち上げられるようにしたことで、衛星分離に関わるインターフェイスが変わりました。
こうした事情で、データベースにデータを蓄積することが難しく、AIによる自律点検はまだ実現していません。
── 将来的には、実現する可能性はあるのでしょうか。また、ロケットに自律点検を導入することにはどのようなメリットがあるのでしょうか。
岡田 ── 実現のためには、まずは同じ構成のロケットをたくさん打ち上げられるようになることが大前提ですね。また、ロケットの点検は、工場でまず段ごとに行い、射点では組み立てた状態で行っているのですが、このうち組み立てた状態でのデータをたくさん貯められるようにすることが必要になると思います。
井元 ── いまのロケットというのは、飛んだあとは「どこを飛んでいるか」、「正常か異常か」ということが最低限わかればいいので、精密な自律点検は、必ずしも必要ではありません。また、いまのイプシロンは年間1機くらいの頻度でしか打ち上げていませんから、その程度であれば、自律点検の必要性は薄いです。
ですが、仮に毎週のように打ち上げるようになると話が変わってきます。いまのロケットとは世界が大きく変わりますから、高頻度打ち上げのために、自律点検を活用する意義が出てくるかもしれません。あるいは、将来的に再使用型のロケットを開発することを想定した場合(図4)、ロケットが飛行中に、自分の機体の健全性を評価する必要が出てくると思いますので、自律点検の機能は必然的に必要になってくると思います。
私たちはいま、データを蓄積して適用すればいいというところまで研究を進めています。自律点検の実現のための、技術の”種”は持っているのです。もし、将来的に自律点検の必要性が生じれば、開発できるように備えています。

- [図4]再使用ロケットの想像図
- JAXAでは現在、ロケットを飛行機のように運用できるようにした「再使用ロケット」の研究を行っている。将来、こうしたロケットが実用化されれば、AIによる自律点検が必要になるかもしれない ©JAXA
より高性能かつ使いやすく、国際競争力を高めた「イプシロンS」
―― 現在開発中の「イプシロンS」について教えてください。
井元 ── イプシロンSの最大の目標は、打ち上げ能力や使いやすさの向上、そして 打ち上げコストも低減させるなどし、「国際競争力を強化する」ことにあります。
そして、そのために「H3ロケットとのシナジー効果」を発揮させ、「新しい技術を適用する」ことを目指しています。
いまのイプシロンは、H-IIAロケットの固体ロケットブースターであるSRB-Aを第1段に使っていますが、イプシロンSでも開発中の次期大型ロケットH3ロケットの固体ロケットブースター「SRB-3」と共通化し、シナジー効果によるコスト低減などを図ります。
見た目でいちばん大きく変わるのが3段目です。推進薬量を倍に増やして大型化したり、姿勢制御方式を変えたりすることで、打ち上げ能力が向上します(図5)。
技術的なところ以外では、民間の力を活用することも重要な目標です。将来的には民間企業のIHIエアロスペース(以下、IA)に運用を移管し、打ち上げ輸送サービスを展開してもらうことで、国際競争力を高めようとしています。
こうしたことを踏まえ、イプシロンSのSには、シナジー(Synergy)や、即応性(Speed)、高性能(Smart)、競争力(Superior)、打ち上げ輸送サービス(Service)といった意味を込めています。
広瀬 ── 射場系では、ロケットを打ち上げたあと、ロケットを追尾するための射場局、テレメーター局と呼ばれるところや、ロケットが正しく飛んでいるかどうかを判定する飛行安全管制システムを、H3と共通化します。いまの強化型イプシロンでもH-IIAと共通化しており、同じ方針でいきます。データのフォーマットなどをできる限り揃えることで、開発費を下げるのが狙いです。
これまでのロケット(H-IIAや1~3号機までのイプシロン)では、地上からロケットに電波を送りその電波をロケットから地上に戻すことで位置を監視するレーダーがありました。強化型イプシロンでは、4号機からレーダーではなく飛行安全用センサを搭載しており、レーダー設備の運用コストの削減を達成しています。H3とイプシロンSでもこの流れを取り込み、飛行安全管制を実施します。
岡田 ── アビオニクスについては刷新し、H3と飛行安全用航法センサーなど共通化できるところはしたり、H3の開発で使った試験データを活用したりし、シナジー効果を図ります。イプシロンSに合わせて新たに開発するものもあります。
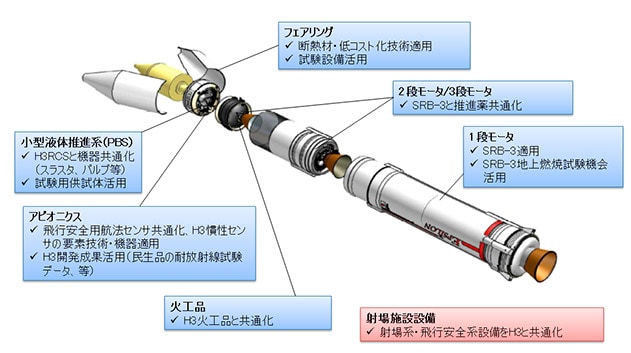
- [図5]H3ロケットとのシナジー効果の発揮の具体例
- ©JAXA


- JAXAへの取材は2021年5月31日にリモートで行われた。
半導体技術の進歩が叶える未来のロケットとは?
── 今後、半導体を含め技術はさらに進歩していくと思いますが、それにより将来のロケットはどのような姿になるのでしょうか。
井元 ── ひとつは、「自律飛行安全」ができるようになることでしょうね。ロケットが自分で位置や速度を監視し、自分でコントロールできるようになれば、地上からの判断に一切頼らずに飛行することができ、さらに衛星通信を活用すれば、先ほどお話ししたレーダー設備の廃止からさらに進んで、地上のアンテナ局(地上局)を完全になくすことができます。初歩的なものは、すでにロシアのロケットなどで実用化されていますが、私たちはもっと進化した、きめ細かに自律判断ができるようなロケットを考えています。
実現のためには、信頼性の確立が大事になります。また、ロケット側に積む搭載機器が増えるので、従来のままではコストも質量も増えてしまいますから、小型・軽量で低コスト、そして自律判断できるほど高性能で高信頼性の機器を開発する必要があります。とくにロケットに搭載する機器は、衝撃や振動の環境が厳しく、高度が高いところを飛んでいるときは放射線も厳しくなります。いかにそうした環境に耐えつつ、小型・軽量、低コストにするかという点が難しいです。
現在の技術水準でも、求めているものに近いものは造れますが、重く、コストも高くなってしまうので、これからの半導体技術の進歩に期待しています。すでにソフトウェアに関しては研究を進めており、おそらくイプシロンSのさらに次の世代のロケットで実用化できるのではと考えています。
岡田 ── 私たちとしては、打ち上げたあとのロケットを地上から追っかけることはしたくないですし、飛行経路を外れたときに指令破壊をするような飛行安全管制も地上から行いたくないという想いがあります。ロケットが自分でどこを飛んでいるか把握し、どういった状態にあるかを判断してくれるようになれば、私たちは打ち上げるだけで済むので、お金もかからないですし、地上局の立地や有無による打ち上げられる方向の制約もなくなります。ただ、それはロケットの「究極の姿」であり、いますぐに実現するのは難しいでしょう。
別の観点では、宇宙専用の部品ではなく、民生品をより多く使うようにすることです。いまのロケットは、計算機や送信機などのアビオニクスの多くで宇宙専用の部品を使っており、そのためコストが高いという課題があります。そこで最近では、自動車に使われているような、巷に大量にある民生品を活用することで、低コスト化しようという動きがあります。ロケットが安くなると、誰でも宇宙に衛星を飛ばせるようになり、宇宙利用が大きく広がることでしょう。
また、いまのロケットはセンサーや電力分配器といった機器がたくさん載っていますが、これを集約して部品数を減らすことができれば、ロケットがシンプルになり、設計や生産がしやすくなります。これも宇宙利用の拡大につながる可能性があると思います。
広瀬 ── 地上設備はロケットの運用に直結するものです。強化型イプシロンの開発の中で、オペレーターの人数を減らしたり、設備をシンプルにしたりといったことは達成できましたが、より扱いやすい設備にして射場での作業者の負担をさらに減らしたり、不具合が出る頻度をさらに減らしたりすることがこれからの課題だと思っています。
たとえば、ロケット専用の特殊な設備を造るのではなく、それこそ秋葉原で手に入るようなパソコンやサーバといった汎用機器を組み合わせて設備を造ることができれば、不具合が起きてもすぐに対応できるようになるでしょう。
イプシロンSは、IAに技術移転して打ち上げ輸送サービス*3化することを前提にしており、IAにロケット機体と機体設計に直結する地上設備の開発を一体で担当してもらっています。これまでJAXAが蓄積してきたロケットシステム*4開発の技術に、IAが強化型イプシロンの開発・製造、および射場での運用を通じて蓄積した技術を加えていくことになります。これにより、これまでより使い勝手の良いものができることを期待しています。
── ありがとうございました。

 |
 |
[ 脚注 ]
- *1 固体燃料ロケット:
- 推進剤に固体(固形)のものを使うロケット。イプシロンでは過塩素酸アンモニウム、アルミニウム、末端水酸基ポリブタジエン(合成ゴム)を混ぜて固めたものが用いられる。液体水素や液体酸素といった、液体の推進剤を使う液体燃料ロケットというのもあり、固体ロケットは、同じ大きさの液体ロケットと比べるとより大きな推力(パワー)を出すことができ、また構造が簡素で信頼性が高く、長期の保存もできるという特長がある。ただし効率は液体ロケットより劣り、また噴射を途中で止めたり推力を変えたりなどのコントロールをすることもできない。日本の固体ロケットは1955年に開発された「ペンシル」ロケットに始まり、長年にわたる技術の蓄積により、高い性能と信頼性、そして伝統を築いている。
- *2 M-Vロケット:
- 日本が1997年から2006年まで運用していた固体ロケット。天文衛星から月・惑星探査機の打ち上げまで幅広く使われ、「世界で最も素晴らしい固体燃料ロケット」として国内外から高く評価されたが、高コストなどを理由に運用を終え、イプシロンにその任を譲った。
- *3 打ち上げ輸送サービス:
- 国内外の企業などから受注してビジネスとして行うロケットの打ち上げサービス
- *4 ロケットシステム:
- ロケット本体と地上施設設備、安全監理を含めたシステム
- Profile
-

-
井元 隆行(いもと たかゆき)
-
1989年、宇宙開発事業団(現JAXA)に入社し、H-IIロケットのエンジン・推進系の開発に従事。 H-IIAロケットの開発取りまとめを担当した後、イプシロンロケットのプロジェクトチームへ。
イプシロンロケットの研究開始当初から開発の取りまとめを担当。
-
広瀬 健一(ひろせ けんいち)
-
1986年に宇宙開発事業団(現JAXA)に入社し、H-IIロケット、H-IIAおよびH-IIBロケットの射場設備の開発に従事。
2011年、イプシロンロケットプロジェクトチームに異動。発射管制設備(LCS)などの射場設備開発を担当。

-
岡田 修平(おかだ しゅうへい)
-
2011年に宇宙航空研究開発機構(JAXA)に入社し、H-IIAおよびH-IIBロケットの射場設備の開発に従事。
2014年、イプシロンロケットプロジェクトチームに異動。アビオニクス開発を担当。
- Writer
-
鳥嶋 真也(とりしま しんや)
-
宇宙開発評論家。宇宙作家クラブ会員。
国内外の宇宙開発に関する取材、ニュース記事や論考の執筆などを行っている。新聞やテレビ、ラジオでの解説も多数。主な著書に『イーロン・マスク』(共著、洋泉社)があるほか、論文誌などでも記事を執筆。
- Webサイト:http://kosmograd.info/
- Twitter:@Kosmograd_Info
新着記事
よく読まれている記事
Loading...- SHARE!
-
-
-
