JavaScriptが無効になっています。
このWebサイトの全ての機能を利用するためにはJavaScriptを有効にする必要があります。
- Science Report
ロボットの進化を支えるさまざまな半導体
- 文/伊藤 元昭
- 2015.02.27

半導体は、どれだけ私たちの生活に身近になってきただろうか。私たちの生活を豊かにし、快適さだけではなく、安心・安全な社会をつくる上で、半導体は欠かせない鍵となる要素になっている。本連載では、この半導体から生まれる未来の製品事例をとりあげいく。第1回はロボット、第2回はクルマ、第3回はIoTについて、それぞれ紹介。今回は、オートメーションを支える産業用ロボットから家庭用のお掃除ロボット、介護ロボットまで、様々なロボットを紹介しながら、そのロボットを動かす「エンジン」としての半導体に焦点を当てていく。
部屋の中を動き回るお掃除ロボットが家電量販店に当たり前のように並び、話し相手になってくれる人型ロボットが販売されるようになった。最近、随分と身近なところにロボットが進出してきたと感じている人は多いのではないか。ロボットは、SF小説やアニメの中にだけ登場する夢の存在から、商品として開発され、利用される時代になってきた(図1)。
産業の分野では、ものづくりや建設、医療、介護、警備など、さまざまなシーンでロボットが既に活用されている。国際ロボット連盟が発行している統計年鑑「World Robotics 2013」によると、2012年に出荷された産業用ロボットは15万9346台。そのうちの約60%が日本で生産されている。日本は世界をリードする"ロボット大国"なのだ。
 |
ロボットの進化は半導体に支えられている
ロボットを作るための技術を一言で表現した「メカトロニクス」という和製英語がある。"機械工学(メカニクス)"と"電子工学(エレクトロニクス)"を合わせて作られたこの言葉が示すように、電子工学はロボット開発に欠かせない要素技術である。そして、電子工学の成果をかたちにした半導体デバイスは、ロボットの進化を支える最重要部品と言える。
ロボットが活躍する場は、今後ますます広がり、人々の生活や社会活動の中で欠かせない存在になるだろう。これから私たちは、高度な半導体デバイスを数多く、惜しみなく使っていくことになる。今、家庭や工場の中で活躍しているロボットには、どのような半導体デバイスが使われているのか。ここで簡単に紹介してみたい。
連綿と続く進化が今始まった
まず、お掃除ロボット。冒頭で半導体デバイスが重要だと言いながら、いきなりの肩透かしで恐縮だが、実はお掃除ロボットは、わずか1個の32ビット・マイコンと数個の赤外線センサーで制御されている。ただし、これはこれから連綿と続くロボットの進化の始まり、最も単純なかたちに過ぎない。もっと高度なロボットも既に登場している。人間の作業を模して自動車を組み立てたり、塗装したりする産業用ロボットは、多種多様でパワフルな半導体デバイスを数多く使って作られている。
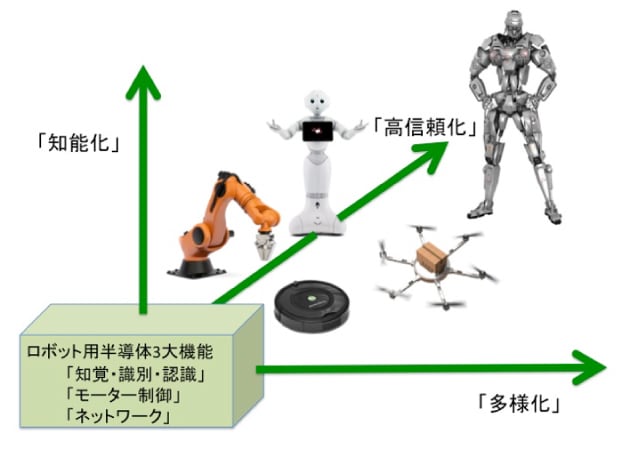
こうしたロボットの中で使われている半導体デバイスを機能別に分類すると、「知覚・識別・認識」「モーター制御」「ネットワーク」の3つに分けることができる。これら3つの機能は、半導体デバイスを使ってロボットに組み込まれる基本要素と言える。今後、ロボットがいかに進化しても、この3つは必ず必要だ。それぞれの機能とそこで使われる半導体デバイスについて、もう少し詳しく見てみよう。
人間をはるかに超える五感
最初は、知覚・識別・認識機能。これには、画像や音声、加速度、温度など、周辺環境や動作状況を把握するためのデータを取り込む、さまざまなセンサーが使われている。さらに、マイコン(制御命令主体のマイクロコントローラー)やDSP(積和演算専用のマイクロプロセッサ)を使って、取り込んだデータを解析。ロボットの制御に利用できる情報を抽出している。
ロボットは、生き物の機能や動きを模して作られる場合が多い。遠方から小さな獲物を見つける鷹、仲間や外敵の匂いを嗅ぎ分ける犬など、驚異的な知覚能力を持った生き物がいる。ロボットのセンサーもまた、人間の五感をはるかに超えるまでに進化している。例えばロボットに視覚を与えるCMOSイメージセンサー。解像度が向上し、より細かいモノまで判別できるようになった。それだけではなく、暗闇の中にあるモノ、目にも留まらぬ速さで動くモノも捕捉できる。生き物の感覚を模しながら、はるかに超えた性能を実現すること。これが現在のセンサー開発が目指していることであり、ロボットに組み込む知覚・識別・認識機能の進化の方向なのだ(図2)。
 |
その場の空気を読むロボット
また近年、センサーで得たデータから意味のある情報を取り出す技術も目を見張る進歩を遂げている。
例えば、デジタルカメラでは、被写体の中から人を判別できるだけではなく、子供か大人か、男性か女性か、笑顔であるかどうかも判別できるようになった。そして子供が笑顔の時だけシャッターが下りるカメラが製品化された。
これまでの機械では、利用者にとって操作しやすいユーザーインターフェースを開発することがとても重要だった。これに対しロボットでは、周辺の環境や状態を自ら判断し、自律的に動く仕組みを作り込むことが重要になる。ロボット自身がその場の空気を読む力が求められるのだ。マイコンの高性能化とアルゴリズム開発の進歩で、ロボットは日に日に鋭い感性を獲得しつつある。
大きな機械を、精密かつ俊敏に動かす
次は、モーター制御。ロボットにメカニクスの要素がある以上、機械的な動きを生み出すモーターを制御する仕組みは欠かせない。大きなモノを動かすパワフルなロボットなのか。それとも複雑で繊細な動きが要求されるロボットなのか。ロボットが行う仕事の内容によって、モーター制御に使われる半導体デバイスの仕様は大きく変わってくる。
モーター制御には、大きく2種類の半導体デバイスが使われる。ひとつは、動力を生み出すモーターを駆動するためのドライバーやスイッチ素子といったパワー半導体。パワー半導体は、当然大きなロボットほど高出力のものが必要になり、複雑な動きをさせる場合には搭載するモーター数に合わせて使う数が増える。
もうひとつは、モーターの動きをきめ細かく制御するためのコントローラー。通常はマイコンが使われる。ここでは、要求される動作やモーターにかかる負荷の変動に合わせて、瞬時かつ精密にトルク(回転する物体が持つ回転方向にねじる強さ)などを制御しなければならない。そのため、複雑な数値演算を多用することになり、思いのほか高性能なマイコンで処理している(図3)。
 |
中も外もネットワークだらけ
最後にネットワーク機能。大きなロボットの各部分同士をつないだり、複数台のロボット同士をつないで連携動作させたりするため、リアルタイム性に優れたネットワーク技術が求められる。また、ロボットをクラウドにつないで、より高度な機能を実現する試みも進んできている。このため、IT系ネットワークへの接続機能も必要になってきた。こうした機能は、マイコン内の周辺回路やDSP、通信プロトコル処理IC(通信する手順に従ってデータを処理するIC)、FPGA(現場でプログラムできるロジックIC)などで実装することになる。
現時点で、ロボット向けに特化したネットワーク技術はない。あえて言えば、ファクトリオートメーション(工場の自動化)向けのネットワーク技術がそれに当たるかも知れない。今後、ロボット向けネットワーク技術として、大容量の情報を瞬時にやりとりできる技術、リアルタイム性の高い技術、信頼性の高い技術といった、際立った特徴を持った技術が求められる可能性がある。IT機器向けや車載向けのネットワーク技術なども含めて、必要に応じて使い分けることになるだろう。
ロボットは多品種少量生産品
さて、今後のロボットはどのような方向に進化していくのだろうか。そしてそこでは、どのような半導体が求められるようになるのだろうか。ロボットは、今後「多様化」「知能化」「高信頼化」の3つの切り口から進化しそうだ(図4)。
いろいろな仕事をこなせる人型ロボット、ヒューマノイドが開発されれば一見便利そうだ。しかし実際には、特定の仕事に特化したロボットを作った方が、作業効率がよい場合が多い。おそらくロボットは当面の間、利用シーンの拡大に伴って「多様化」していく多品種少量製品の可能性が高い。
そこで、より多彩な仕様のロボットを、開発コストを抑えながら設計・製造できる仕掛けが求められる。これを半導体デバイスに対する要求に焼き直すと、組み込む機能を柔軟にプログラムできる半導体デバイスの適用範囲が広がることになる。中でも汎用性が高いマイクロプロセッサーと、ハードウェアも自由に構成できるFPGAの利用範囲が拡大すると思われる。
 |
多くのロボットが知恵を共有しながら成長
産業用ロボットは、職人の技を学習させることで、自律的に状況判断しながら作業をこなせるようになる。これからのロボットは、使えば使うほど効率よく仕事をこなす方法を学習していく方向へと「知能化」していきそうだ。これを、近年急激な進歩を遂げている機械学習(人工知能)技術が支えることだろう。
ソフトバンクは、経験を学習して人に接する対応が成長するロボット「Pepper(ペッパー)」の販売を開始した。クラウド上に置いた人工知能が、さまざまな家庭や職場にあるPepperから経験を集め、これを集合知にして、加速度的に成長していく。自分の経験も糧にできない私などは、相当まずいことになりそうだ。こうしたクラウドを使った人工知能では、ロボット本体だけではなく、データセンターに高度な情報処理能力と大容量のメモリーが必須になる。
徹底した高信頼化は自律動作の大前提
ロボットは人やモノと係わり合って、自律的に仕事をこなす機械である。安全の確保について、ユーザーが手出しできる部分は極めて少ない。圧倒的にロボットメーカーに委ねられる部分が多いのだ。このため、他の工業製品以上に「高信頼化」を追求していくことになる。
2014年2月1日に、国際標準化機構(ISO)は、生活支援ロボットの安全性に関する国際標準化規格「ISO13482」を発行した。日本の新エネルギー・産業技術総合開発機構(NEDO)が提案し、出来上がったロボットの安全性を規定した初めての規格である。高信頼化を追求する流れに沿って、半導体デバイスとそれを利用するための開発環境もまた、機能安全規格の準拠など一層の信頼性向上が求められることになろう。
今後ますます少子高齢化が進む日本。"ロボット大国"であるだけではなく、"ロボット利用大国"になっていくことだろう。世界で最もロボットを必要としている日本が、ユーザー視点で半導体デバイスの活用を考えることで、世界のロボット開発をリードしていくに違いない。次回は、今後成長が期待されているIoT(インターネットオブシングス)に見る例を紹介する。IoTは、あらゆるモノがインターネットにつながるコンセプトを含み、そこに新しい未来を見ることができる。
[第2回へ続く]- Writer
-
伊藤 元昭(いとう もとあき)
-
株式会社エンライト 代表
富士通の技術者として3年間の半導体開発、日経マイクロデバイスや日経エレクトロニクス、日経BP半導体リサーチなどの記者・デスク・編集長として12年間のジャーナリスト活動、日経BP社と三菱商事の合弁シンクタンクであるテクノアソシエーツのコンサルタントとして6年間のメーカー事業支援活動、日経BP社 技術情報グループの広告部門の広告プロデューサとして4年間のマーケティング支援活動を経験。
2014年に独立して株式会社エンライトを設立した。同社では、技術の価値を、狙った相手に、的確に伝えるための方法を考え、実践する技術マーケティングに特化した支援サービスを、技術系企業を中心に提供している。
- URL: http://www.enlight-inc.co.jp/
新着記事
よく読まれている記事
Loading...- SHARE!
-
-
-
