JavaScriptが無効になっています。
このWebサイトの全ての機能を利用するためにはJavaScriptを有効にする必要があります。
- Science Report
- サイエンス リポート
日本初の月面着陸に成功した「小型月着陸実証機(SLIM)」が乗り越えた苦難と大きな成果
- 文/鳥嶋 真也
- 2024.04.17
Credit: JAXA
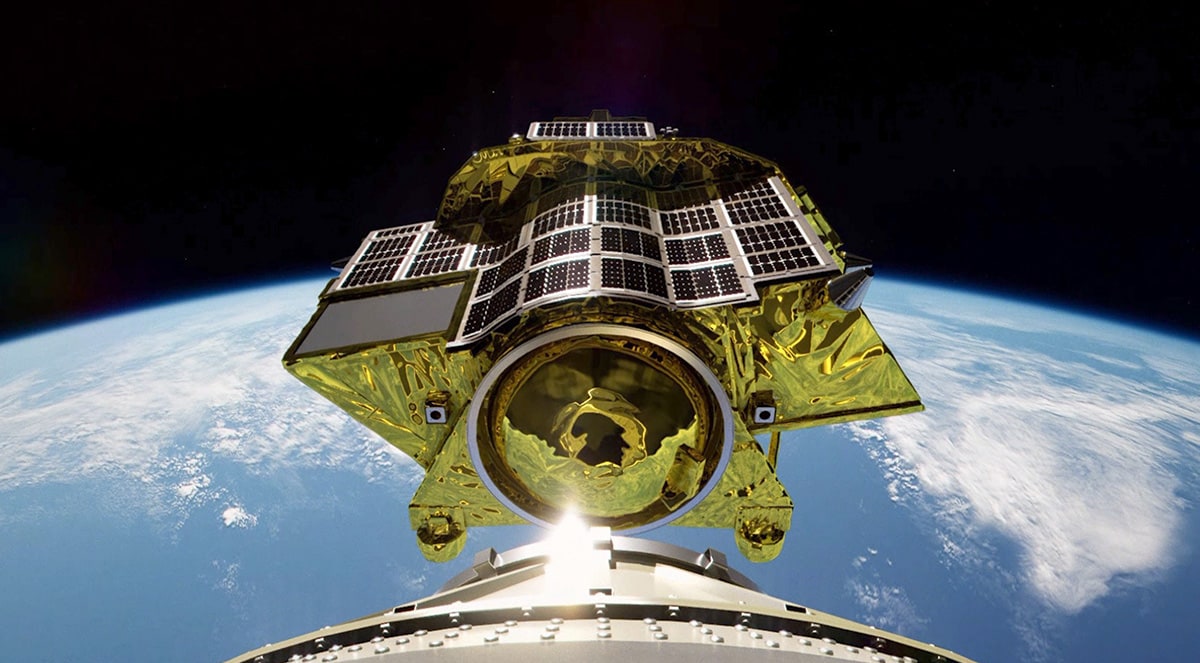
日本の宇宙航空研究開発機構(JAXA)は2023年9月、探査機「小型月着陸実証機(SLIM)」を打ち上げた。SLIMが目指したのは、日本初の月面着陸 ―― それもただ着陸するだけでなく、誤差100mという前代未聞の高い精度での着陸技術の実証だった。そして2024年1月、SLIMは月面着陸に挑んだ。そこには想像を超える物語が待っていた。

- [図1] SLIMに搭載されていた小型プローブ「LEV-2(SORA-Q)」が撮影したSLIMの様子
- (C) JAXA/タカラトミー/ソニーグループ(株)/同志社大学
小型月着陸実証機(SLIM)とは
地球にいちばん近い天体である月。人類は太古の昔から、その姿を見つめ続け、親しみや畏敬の念を抱いてきた。
そして宇宙開発の始まりとともに、約38万km離れたその地表を目指し、数多くの探査機を送り込んできた。1966年にはソヴィエト連邦が世界初の月面着陸に成功し、69年にはアメリカが有人月着陸に成功した。その一方で、失敗に終わった探査機も多く、いまなお月面着陸は難しい技術のひとつである。
その月面着陸を目指しJAXAが開発したのが「小型月着陸実証機(SLIM、Smart Lander for Investigating Moon)である。SLIMはただ月に着陸するだけでなく、誤差100mの高精度での「ピンポイント着陸」を始めとする、将来の月探査機に必要となる新しい技術の実証を目的としていた。
ピンポイント着陸が求められる理由
これまで月面に着陸した探査機は、着陸精度が数km~十数kmと誤差がとても大きかった。そこでSLIMは、誤差100mという桁違いに高い精度で着陸できるよう造られている。
これは例えるなら、これまでの月探査機は、東京駅に着陸するつもりが品川駅に降り立ってしまうような性能しかなかったが、SLIMは東京駅の駅前広場のある一点や、ある番線のホームに狙って着陸できるほどの性能である。
従来は、そもそも月面に無事に降り立つということだけでも難しく、また月には街やビルがあるわけではないので、誤差が大きくても問題はなかった。しかし、今後の月探査では、より高い精度での着陸技術が必要になってくると考えられており、SLIMは、そんな未来を見据えて開発された。
例えば近年、月面の詳細な地図が作られたことで、科学者たちからは「この岩を調べたい」という要望が出てきている。従来であれば、目的の岩から遠く離れたところにしか降りられなかったため、とても探査できなかったが、ピンポイント着陸ができれば、岩のすぐ隣に降りて探査ができる。
また科学的に興味深い場所というのは、得てして大小様々な岩石が転がっていたり、凹凸が厳しかったり、傾斜があったりと、複雑な地形になっていることが多い。さらに月の極域にあると考えられている水(氷)を採り出して、資源として利用しようという研究も進んでいるが、水がある場所もまた、範囲が狭く、地形などの条件が厳しいところが多い。その中から着陸できそうな場所へ狙って降りる場合にも、ピンポイント着陸が役に立つ。
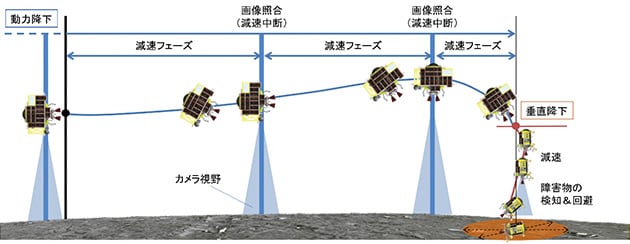
- [図2] SLIMの月面降下シーケンス
- (C) JAXA
ピンポイント着陸を実現する新技術「画像照合航法」と「自律的な航法誘導制御」
ピンポイント着陸を実現するため、SLIMは「画像照合航法」と「自律的な航法誘導制御」という2つの新技術を使う。
画像照合航法は、探査機のカメラで撮影した月面の画像を使い、自身の位置を推定して航行するという技術である。まずカメラが撮影した画像から、「どこにどんなクレーターがあるか」を調べる。そして、あらかじめ用意していた月面の地図と照らし合わせて、一致する場所を特定し、自身の位置を知る。もし、そこで計画している軌道から離れていれば、一致するように修正する。これを繰り返すことで、狙った場所に近づいていく。
ただ地球と月は約38万kmも離れており、通信には約2.5秒の時間差が生じるため、地上から操縦していては、とても間に合わない。そこでSLIMは、搭載しているコンピューターが自律的に画像照合航法を行えるようになっている。いわばSLIM自身が、自分の目で見た景色と、手元にある地図を見比べながら航行するのである。
さらに着陸目標地点の上空まで効率良く到達するため、SLIMが自分の判断で、画像照合航法のデータや、他のセンサーからの高度などの情報を参考にしながら軌道の修正を行う、自律的な航法誘導制御技術も搭載している。加えて着陸地点の上空では、画像から障害物を検出し、それを回避して、安全に降りられる場所を自ら判断することができる機能もある。
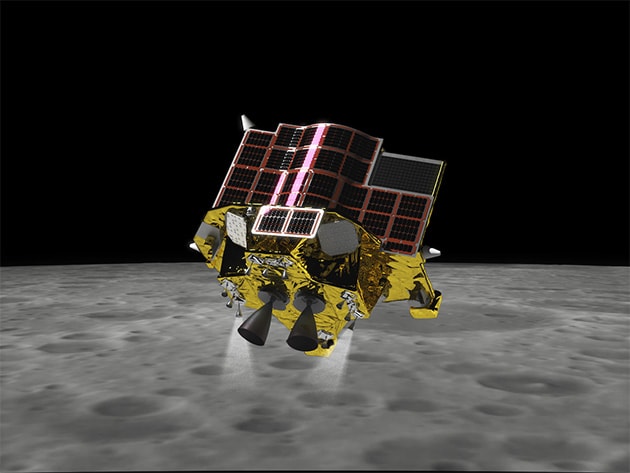
- [図3] 月面に着陸するSLIMの想像図
- (C) JAXA
世界に誇る日本の実証機「スリムな機体、二段階着陸、超小型探査車」
SLIMはまた、その名前の通り“スリム”な、つまり小型・軽量な探査機を造る技術の実証も目的のひとつになっており、最先端技術による小型・軽量化、さらに国産化が図られている。探査機を小さく造ることができれば、岩などが転がっている複雑で狭い場所に降りやすい。また、軽くできれば、その分観測装置などをたくさん積むこともできる。
これにより、SLIMの寸法は高さ約2.4m、縦約1.7m、横約2.7mで、打ち上げ時の質量は約700kgと、軽自動車くらいのサイズしかない。過去にこれほど小さな探査機が月に降り立った例はない。
もうひとつのユニークな点が着陸方法である。従来の月探査機は、垂直に降りてきて、そのままストンと居座るように着陸していた。
しかし、SLIMが目指す着陸地点――「神酒の海」付近の「しおり(SHIOLI)」クレーター近くの地域は、約15度の傾斜があり、従来の着陸方法では機体が倒れてしまう危険があった。また前述のように今後の月探査では、同じくらい難しい地形への着陸が求められると考えられており、安定して降りられる技術が求められた。
そこでSLIMは「二段階着陸」という着陸方法を使う。まず機体を垂直にして降下してきたSLIMは、機体の後部にある主脚で一度接地したあと、あえて機体を前方に倒して、他の脚を接地させて着陸するという前代未聞の方法である。これが可能になったのも、小型・軽量な機体だからこそだった。
またマルチバンド分光カメラ(MBC)という観測機器も搭載し、月の起源と進化を解明することも目指している。
くわえて、「LEV-1(Lunar Excursion Vehicle-1)」と「LEV-2(別名SORA-Q)」という2台の超小型プローブ(探査車)も搭載し、着陸の直前に月面へ放出する。それぞれ手で持てるほどの小さな探査機で、月面を移動したり、写真を撮って地球へ送ったりすることができる。

- [図4] SLIM
- (C) JAXA
SLIMが日本初 月面着陸を達成した歴史
第1章:着陸するも逆立ちするような姿勢に
SLIMは2023年9月7日、H-IIAロケットで種子島宇宙センターから打ち上げられた。少ないエネルギーで月へ行ける特殊な軌道で飛行したあと、12月25日に月を回る軌道に入り、着陸に向けた準備を整えた。
そして2024年1月20日0時ちょうど、SLIMは2基あるメインエンジンを噴射し、月面に向け降下を開始した。
SLIMは画像照合航法と、自律的な航法誘導制御を順調にこなして着陸地点に接近し、さらに着陸地点の上空では、障害物の検出と回避もこなした。その結果SLIMは、当初の着陸目標地点から11.8m離れた、障害物のない安全な場所を目指すことになった。
しかし、その直後、時間では0時19分18秒に、2基あるメインエンジンのうち1基に異常が発生し、推力が約半分になってしまった。SLIMはエンジン1基でも、ある程度であれば月面に着陸できる設計になっていたが、完全に制御することはできず、横方向に移動しながら、やや不安定な動きで降りていった。
最終的にSLIMは、0時19分52秒ごろ、月面に着陸した。
だがエンジンに異常があったためか、当初の目標着地地点から東側に約55m離れたしおりクレーター付近に着陸することになり、さらに二段階着陸もうまくできず、逆立ちするような姿勢で月面に落ち着くこととなった。
加えて太陽電池から電力が発生していないこともわかった。想定とは異なる姿勢で着陸したため、太陽の光が当たっていなかったのである。しばらくはバッテリーで動くことはできるものの、いずれ充電がなくなれば止まってしまう。そこで運用チームは、バッテリーが生きている間に、あらかじめ用意していた異常時対応手順を実行した。
まず不要な機器の電源をOFFにするとともに、着陸までに取得したデータのダウンロードが行われ、必要なものはすべて取り出すことに成功した。さらに分光カメラも正常に動作し、月面の画像を地球へ送り届けた。
そして、やがてバッテリーは尽き、SLIMは眠りについた。

- [図5] SLIMが着陸直後に撮影した月面の様子
- (C) JAXA
第2章:月の越夜に成功し再起動したSLIM
だがSLIMの物語は、それで終わらなかった。1月28日になって眠りから目覚め、運用を再開したのである。
SLIMは太陽電池を西の方角に向ける形で着陸したため、着陸した時点では、太陽光が当たらない状態だった。その後、月が夕方になり、西日が差すようになったことで、太陽電池に太陽光が当たり、発電が再開され、目覚めることができた。
実は運用チームは、SLIMの運用が中断する直前に、バッテリーが過放電して損傷するのを防ぐため、回路からバッテリーを切り離す作業を行っていた。さらにSLIMは太陽電池の電力が発生すると自動的に起動し、その発生電力が一定以上あれば動作を続けることも可能なように設計されていた。そうした狙いや工夫が的中したのである。
目覚めたSLIMは、科学観測や撮影した画像の送信などを行った。そして1月31日には、着陸地点が日没を迎え、太陽電池に太陽光が当たらなくなったため、再び眠りについた。
月は昼が約14日間続き、その後夜が約14日間続き、また昼が訪れるというサイクルを繰り返している。ではSLIMにまた太陽光が当たるようになれば、再び目覚めるかといえば、それは未知数だった。
月の夜の温度は最低で-180℃にまで下がる。この低温に耐えて夜を乗り越える「越夜(えつや)」は技術的に難しく、例えば放射性同位体の崩壊熱を利用したヒーター(Radioisotope heater unit)を搭載するなど、高価で複雑な技術が必要になる。そのためSLIMは、そもそも越夜を想定した設計にはなっていなかった。
ところが2月25日の夜、運用チームがSLIMにコマンドを送信したところ応答があり、幸運にも越夜に成功したことがわかった。残念ながら分光カメラはうまく動かなかったものの、航法カメラによる月面の画像撮影には成功し、越夜後の運用に一定の成果を上げた。3月1日にはしおりクレーターが日没を迎えたことで、SLIMはふたたび休眠に入った。
運用チームは、次に日が当たるようになる3月下旬にも運用を再開できるよう準備を進めた。そして3月27日、SLIMからの応答があり、2回目の越夜に成功した。センサーやバッテリーなどに少しずつ不調がみられたものの、航法カメラによる月面の画像撮影などを行った。
運用チームは現在、4月下旬ごろの3回目の越夜後運用を目指し、準備を続けている。月の昼と夜の厳しい温度サイクルを繰り返すことになるため、故障する確率はだんだん上がってはいるが、SLIMの挑戦はこれからも続いていく。
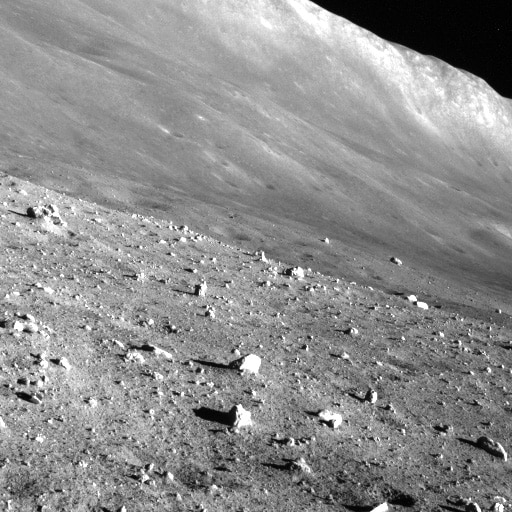
- [図6] 1回目の越夜から目覚めたSLIMが撮影した月面の様子
- (C) JAXA
転んでもただでは起きない! 課題を残すも、ピンポイント着陸の技術実証は達成
逆立ちするような姿勢で着陸してしまうなど、計画通りとはいかなかったが、まさに「転んでもただでは起きぬ」のことわざ通り、SLIMは日本の宇宙探査にとって、そして宇宙開発の歴史にも大きな成果を残した。
大きな目標のひとつだったピンポイント着陸については、画像照合航法と自律的な航法誘導制御によって着陸地点の上空に到達した時点での着陸地点とのずれは、JAXAによると「10m程度以下、おそらく3~4m程度」であったとし、「100m精度のピンポイント着陸の技術実証は達成できたものと考えられる」と評価している。
また着陸までの技術的なデータや、分光カメラが撮影した画像の送信にも成功し、今後の研究に役立つ成果が得られた。
着陸の直前、高度約5m付近では、LEV-1とLEV-2(SORA-Q)を放出した。両機はそれぞれ月面に降り立ち、LEV-1は計画していた跳躍移動や地球との直接通信を実施した。ただ月面での画像の取得はできなかった。LEV-2(SORA-Q)は、球形の収納状態から走行形態へ変形し、月面を走行できたことが確認された。さらに搭載していたカメラによりSLIMの撮影にも成功した。
さらにSLIMが越夜できた理由がわかれば、放射性同位体の崩壊熱を利用したヒーターのような特殊な技術がなくても越夜できる、軽量かつ低コストで、より長く運用できる月探査機の実現につながる可能性もある。
一方で、メインエンジンが異常を起こしたことは課題として残った。また、二段階着陸の技術実証もできなかった。ただ原因調査と対策を進めることで、将来的に壊れにくい、より強い探査機を造ることにつながるだろう。
宇宙開発の発展は目覚ましく、そう遠くないうちに人類は再び月の大地を踏みしめ、そしていつか月面に都市を築き、誰もが行ったり来たりできるようになるだろう。逆立ちでたたずむSLIMも、月の観光名所のひとつになるかもしれない。
SLIMは私たちに、そんな未来を実現するための技術とノウハウを残し、そして希望を見せてくれたのである。
- Writer
-
鳥嶋 真也(とりしま しんや)
-
宇宙開発評論家。宇宙作家クラブ会員。
国内外の宇宙開発に関する取材、ニュース記事や論考の執筆などを行っている。新聞やテレビ、ラジオでの解説も多数。主な著書に『イーロン・マスク』(共著、洋泉社)があるほか、論文誌などでも記事を執筆。
- Webサイト:http://kosmograd.info/
- Twitter:@Kosmograd_Info
- https://note.com/celestial_worlds
新着記事
よく読まれている記事
Loading...- SHARE!
-
-
-
