
No.016
特集:宇宙ビジネス百花繚乱
Visiting Laboratories研究室紹介
宇宙ステーションから衛星を発射
吉田 ── 国際宇宙ステーションの「日本モジュール」には、宇宙飛行士が滞在する与圧部と、真空の宇宙空間を結ぶエアロックと呼ばれる2重ドアがあり、与圧部内の物資を外に運び出すことができます。私たちの衛星も、このドアを通して宇宙空間に運び出されました。その後、衛星は日本のロボットアーム(JEMRMS)につかまれて放出方向へと移動し、送り出す角度をアームで調整してから、ばねの力で衛星を押し出し、軌道に投入されました。これは「日本モジュール」だけにある機能なのですが、今は世界中の人々がこれを利用しています。
実は、私たちの2012年の衛星も同様の方式で宇宙ステーションから放出されました。その時は2Uサイズのキューブサットだったのですが、これは宇宙ステーションから発射する衛星の世界初第1号でした。そして、2016年のフィリピンの衛星は重さ50kg、この方式で放出できる最大級のサイズで、最初の50kg級衛星となりました。私は宇宙ステーション史上の「初めて」を2回も経験させてもらったことになります。
 |
月面探査ロボットを開発中
吉田 ── いま一番力を入れているのが月面探査ロボットの開発です。国立大学法人の研究者としては、はやぶさの時のようにJAXAが主導する国家プロジェクトとしての宇宙探査に協力することが本務だと思っています。しかしながら、超小型衛星で得た経験は、大学独自でも宇宙空間で機能する機器を開発し、宇宙に送り込んで機能させることができるというものでした。そしていま、月面を探査するロボットを大学や民間企業で開発し、自分たちの手で実際に月に送り込むことができるのではないかと考えています。
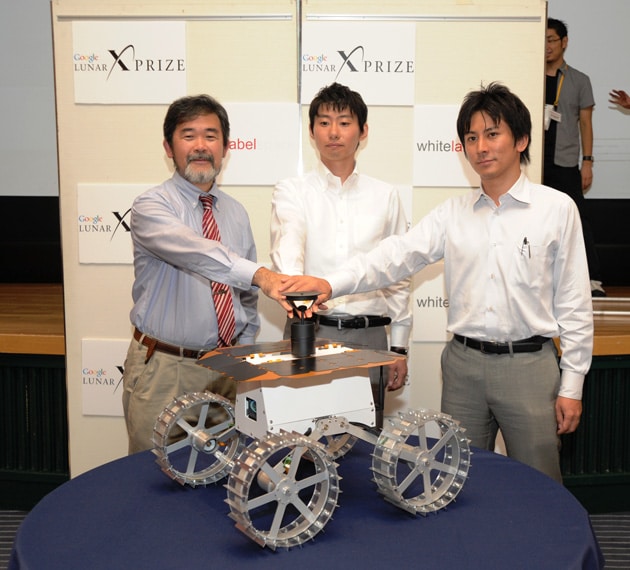
大学や民間の力だけで月面探査をしよう、というのは突拍子もないチャレンジに聞こえるかもしれませんが、私たちにそのようなきっかけを与えてくれたのがGoogle Lunar XPRIZEです。これはアメリカのXPRIZE財団というNPO法人が企画し、Googleがスポンサーとなり1等賞金2000万ドル、総額3000万ドルを提供する国際的な賞金レースです。参加条件は民間企業であること、つまり国の予算を使わないということです。優勝の条件は、探査ロボットを月面に着陸させ、着陸後500メートル以上移動させること。そして着陸後と移動後に高解像度(HDTV)の画像を地球に送ってくることです。これらを最初に達成したチームに賞金が与えられるという訳です。
この賞金レースのアイデアの元となったのは、チャールズ・リンドバーグが獲得したオルティーグ賞です。これは、大西洋を単独無着陸で横断飛行できるかを競う賞金レースでした。リンドバーグは1927年にオルティーグ賞を受賞し、その後、航空機産業が爆発的に伸びたという歴史があります。月面探査レースも同様な考えです。
Google Lunar XPRIZEは2007年に企画が発表され、2010年に参加登録が締め切られました。世界から34チームが名乗りを上げましたが、日本から参加しているチームが一つあります。それが私たちのチームです。このレースで優勝するためには、地球軌道を離れて月面に到達する宇宙船(月着陸船)の技術、月面上を移動するロボット技術、そしてこれらの技術開発やロケット打ち上げを可能にする資金力の三要素が必要になります。私自身はロボット技術には自信を持っていますが、他の二つはありません。そこで当初はオランダを中心としたヨーロッパのメンバーが月着陸船の開発を行い、日本がロボット(ローバー)を開発するという体制で活動を開始しました。2010年1月に袴田武史氏らと出会い、White Label Space Japan という名前の会社を立ち上げました。しかしながら、2012年にヨーロッパのメンバーが離脱してしまい、2013年より日本単独の月面ローバーを開発するチームとして活動を継続することにしました。このときにチーム名をHAKUTOに変えました。これは白兎を音読みしたものです。日本人にとって月と兎は深い関係にあるので、それをアピールするために名付けました。また、HAKUTOをプロジェクトを運営し、技術開発を継続的に行う会社として、White Label Space Japanを改組して株式会社ispaceを設立しました。
 |
吉田 ── 2015年1月には、月探査に向けて技術開発が進んでいる5つのチームに中間賞が与えられました。チームHAKUTOは、ローバーの技術開発が評価されて、この賞を取ることができました。しかしながら、月面に到達するための着陸船がなければ、このレースで優勝することはできません。そこで、中間賞を取ったチームの中で着陸技術に長けたチームと相乗りをするという戦略をとることにしました。当初は米国のAstroboticと準備を進めたのですが、彼らは2016年末でレースを離脱してしまいました。そこで、インドのTeamIndusとパードナーシップを結ぶことにしました。2017年1月の時点では、HAKUTO、 TeamIndusそして米国のMoon Express、イスラエルのSpaceIL、多国籍のSynergy Moonの5チームがこのレースの最終候補に残り、レースの最終期限があと1年余りであることが発表されました。HAKUTOは2017年12月までにローバーを完成させ、インドに運び込んで最後の調整に備えていましたが、2018年1月下旬、主催者であるXPRIZE財団より、どのチームも2018年3月までに目標達成する見通しが立たないことから、優勝者無しでレースが終わってしまうことがアナウンスされました。
 |
レースは終わっても月面探査に向けた活動は継続
TM ── どのチームも打ち上げロケットで苦労していたようですね。
吉田 ── はい。このレースでは、ロケット打ち上げ、月面着陸、月面移動のすべてを自分たちの手で成し遂げなければなりませんでした。人類は、1969年のアポロ11号で有人月着陸に成功し、月面に足跡を残して無事に地球に帰還しています。有人着陸探査はアポロ計画のみでしたが、国家プロジェクトとしての月面無人着陸探査は、数多く実施されています。国家プロジェクトとしてそれなりの予算を投じれば、技術的には可能なのです。しかし、それを一私企業で実施しようとすると様々な困難がありました。
ロケット打ち上げについては、各国が保有する国営のロケットを使うことが考えられます。また、現在はSpaceX社の商業ロケットFalcon9を使うことも可能です。しかし無償というわけにはいかないので、それなりの資金が必要になります。ロケット1本を丸ごとチャーターしようと思うと、50〜100億円の費用がかかるというのが相場です。これは、賞金より大きな金額ですね。そこで、他の衛星プロジェクト等に相乗りして、一緒に打ち上げてもらうという考えが生まれてきます。この方法であればコストは節約できますが、スケジュール管理が難しくなります。私たちは、さらにこの考えを進めて、競争相手であるTeamIndusの着陸船に相乗りすることで、さらにコストを分担するという方針をとりました。この考え方は間違っていなかったと思っています。成功すれば、二つのチームで1位2位の賞金を分け合うことにもなりますので。国際協力はこれからのビジネスには必要なことですから、ビジネス的な観点からも相乗りにはメリットがあるわけです。
SORATOと名付けたHAKUTOの最終モデルの開発は、東京のispace本社で行われました。東北大で開発していた研究モデルは重量8kgほどあったのですが、工夫を凝らして軽量化を行い、最終的には同じ性能を保ちながら重量4kgまで軽くすることができました。重量がそのまま打上げコストに反映されます。単純計算で、月面まで1kgあたり1億円以上の輸送コストがかかるので、これはビジネス的にも重要なポイントです。
レースの賞金は無くなってしまいましたが、私たちは月面着陸を行いロボット探査を行う目標に向けて活動を続けていきます。いまや、私たちの挑戦には賞金以上の価値があると考えています。月面で持続可能なロボット探査ビジネスを行うという私たちispace社の構想に対して、多くの企業や投資家の皆さんから、株式投資をいただき2017年12月時点で101.5億円を調達しました。私たちはこの資金をもとに、月着陸船の開発に着手しています。もちろんSORATOを月面に送り届けることが優先課題ですが、2020年代にはSOROTOを発展させた探査ローバーが、ispace自社開発の着陸船に乗って頻繁に月に向かって飛んでいくという時代を作りたいと考えています。


Expert Interview



Visiting Laboratories


Science News

-
21.3.22NEW
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる