

人間では対応しにくい状況を肩代わり
ここからは、ADASの進化の過程をたどり、機能や利用シーンが限られたクルマの自律制御システムが、どのように自動運転システムへと進化していくのか解説する(図2)。
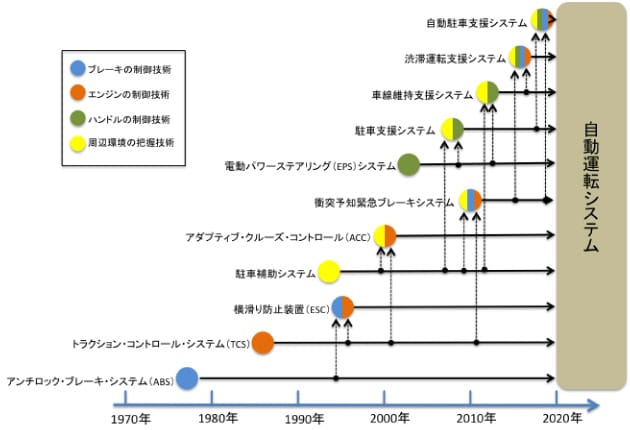 |
最初にクルマに搭載された自律制御システムは、「アンチロック・ブレーキ・システム(ABS)」だった。1978年のことである。ABSは、滑りやすい路面でブレーキング中に起こる、ホイールロックを防ぐシステム。ホイールがロックしそうな状況をセンサで検知した時、ブレーキ圧を自動調節して、ブレーキを踏み切った状態でもブレーキのリリース/ホールドを繰り返し、ロックがかからないように安全にハンドル操作できるようにする。ABSは、事故の発生を未然に防ぐ「予防安全(アクティブセーフティ)」の先駆けでもある。
次に開発されたのが、1986年に導入が始まった「トラクション・コントロール・システム(TCS)」。滑りやすい路面でも、最適な加速ができるようにするシステムである。発進時や加速時の駆動輪の空転を防ぐため、エンジンを自動制御し、同時に空転しているホイールにブレーキをかけたり緩めたりする。ABSとTCSは共に、運転技能に自信がないドライバーでも安全に操縦できるように、電子システムが難しい手順を肩代わりすることを狙ったものだ。
周辺環境の把握が始まる
1993年には、「駐車補助システム」の導入が始まった。駐車時にクルマが障害物に近づくと、緊急度に応じて音や表示で警告を発するシステムである。視界が限られている場合や、狭い駐車スペースで簡単に駐車するためのものだ。このシステムは、自動運転につながるADASに欠かせない要素技術である、センサで周辺環境を把握する技術の先駆けとなった。
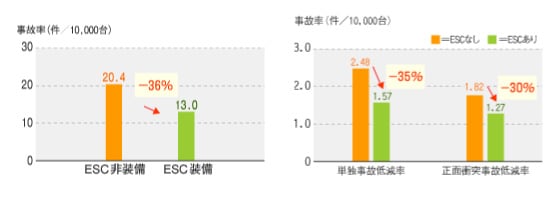
1995年には、「横滑り防止装置(エレクトロニック・スタビリティ・コントロール:ESC)」が導入された。車両が横滑りしそうな状況をジャイロセンサ(ヨーレートセンサとも言う)が検知し、ブレーキとエンジンを適切に制御して、横滑りを未然に防ぐ。システム構成から見れば、ABSとTCSの機能を組み合わせた、複合システムである。ESCの導入効果はデータで実証され、今では欠かせない予防安全システムとなっている(図3)。ちなみにECSには、トヨタ自動車の「VSC」、日産自動車の「VDC」、Volkswagen社の「ESP」と、自動車メーカーごとに固有の呼び名がある。
 |
通常走行での自動化に踏み切る
自律制御システムの進化は、さらに加速していく。2000年には、「アダプティブ・クルーズ・コントロール(ACC)」が導入された。自動車専用道路での利用を前提として、安全な車間距離を自動的に維持するシステムである。交通状況の変化に応じて、エンジンの出力を調整して、車速を自動調整する。ACCは、緊急時だけではなく、通常走行時にも自律制御システムに運転を委ねる思想で、予防安全の実現から自動運転の実現へとその狙いが変わった、マイルストーンとなるシステムである。
2008年には、「駐車支援システム」が導入された。駐車スペースを自動的に把握して、自動的に精度の高いハンドル操作を行い、車両を駐車スペースに移動させる。ただし、加減速はドライバーが行う。このシステムは、2000年代初頭に導入された「電動パワーステアリング(EPS)システム」に、駐車補助システムで培った周辺環境を把握する技術を組み合わせて開発された、ハンドル操作を自律制御するシステムの先駆けである。
駐車支援システムのベースとなったEPSは、ハンドルの動きをセンサで検知し、その情報に基づいて操舵車軸の向きをモーターで変えるシステムである。初期のパワーステアリングは、エンジンで生み出した油圧を使う機械的な仕掛けだったが、電動式にしたことで燃費の向上を狙った。EPSの導入によって、ハンドルと操舵車軸が機械的に分断され、操舵を電子制御する素地が出来上がった。










-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

