

第2回
自動運転システムの構成と業界構造の変化
- 2015.10.09

クルマが走行している時の周辺環境はさまざまだ。市街地や山道、高速道路、見通しのよい道、交差点といった場所の違い。昼間と夜間といった時刻の違い。快晴と雷雨、雪といった天候の違い。道が空いている時と渋滞時など交通状況の違い。しかも周辺環境は、走行中に刻々と変わる。安全で快適な自動運転車を実現するためには、走行中のクルマが周辺環境を正確に把握する技術、アクセル、ブレーキ、ハンドルを状況に応じて適切に制御できる技術の確立が欠かせない。連載第2回では、こうした要件を満たす自動運転システムの構成と、それを実現するために変化し始めた業界構造について解説する。
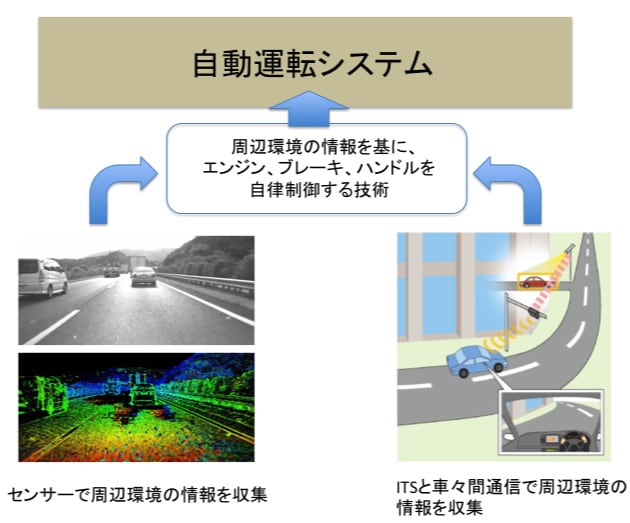
自動運転システムでは、周辺環境を正確に把握するために、二つのアプローチの技術を使うことになる(図1)。一つは、クルマに搭載したセンサで情報を収集する技術。もう一つは、道路インフラや周辺のクルマなどから無線通信を介して情報を収集する技術である。得られる情報の質が違うこれら二つの技術を組み合わせることで、安全で快適なクルマの自律制御ができるようになる。
二つのアプローチで自動化を実現
クルマに搭載したセンサで情報を収集する技術は、「衝突予知緊急ブレーキシステム」や「駐車支援システム」といった「先進運転支援システム(ADAS)」の中で進化している。映像でクルマ周辺のモノや人を認識するカメラ、遠くの障害物や対向車などを検知するレーダーといった、さまざまなセンサを駆使して情報収集するシステムが実用化している。
一方、道路インフラから無線通信を介して情報を収集する技術は、有料道路の料金徴収に利用されている「電子料金授受システム(ETC)」やカーナビの渋滞情報でお馴染みの「道路交通情報通信システム(VICS)」といった「高度道路交通システム(ITS)」の中で進化している。ITSと自動運転が融合することで、中央管制が可能になり、道路上を走っているクルマ全体の流れを最適化できるようになる。
クルマ同士が通信して情報交換する車々間(Vehicle to Vehicle:V2V)通信技術は、ITSとADASを補助するため、これから導入が始まる技術である。クルマ同士で情報を交換することで、しなやかに動く魚や鳥の群れのように、単純な制御で円滑な走行が可能になる。また、クルマ同士でバケツリレー的に情報を転送すると、遠方の正確な情報でさえ取得できるようになる。
周辺環境を正確に把握できた後には、得られた情報をアクセルやブレーキ、ハンドルの自律制御に的確に活かす技術が求められる。自動車業界は、利用シーンと機能を限定した自律制御システムから、複雑で高度な機能を持った自動運転システムへと段階を踏んで進化させるシナリオで、この技術を確立しようとしている。技術開発と市場での運用を、時間をかけて慎重に進めて、技術の熟成と実績の蓄積を同時に進める戦略だ。自動運転を前提にした法律や制度、サービスインフラの整備や、自動運転に対するドライバーの認知、信頼感の醸成もその間に図ることができる。
 |










-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

