

自動ブレーキは二つの技術
自動ブレーキ技術には、二つの方法がある。一つはカメラで映像を撮り、映像の流れから前方の車などの物体との距離を計算していく方法で、もう一つはレーダーを使う方法である。前者のカメラを使う場合には、例えば前方の物体と自分のクルマとの間に白線の台形を表示し、遠近法を使って白線の台形が遠くまで伸びていると、前方の物体からは離れているが、台形がつぶれてくると近づいていると判断する。こういうアルゴリズムを使っているクルマはある。またレーダーを使う場合は、クルマから電波を発射し、その反射までの時間を測ることによって距離を測定する。
二つの方法とも一長一短あり、カメラは距離を測定できないが、物体の形を知ることができ、レーダーは物体の形はわからないが距離を測定できる。最近では、二つの方法を併用して使うことも、できるようになってきている。カメラも、レーダーも低コストで製造できるようになりつつあるからだ。特にレーダーは、当初GaAs(ヒ化ガリウム)というシリコンよりも数倍も高価な材料でしか77GHzという周波数で動作できなかったが、その後より安価なSiGe(シリコンゲルマニウム)に置き換わり、最近では最も安いシリコンだけで動作できるようになった。
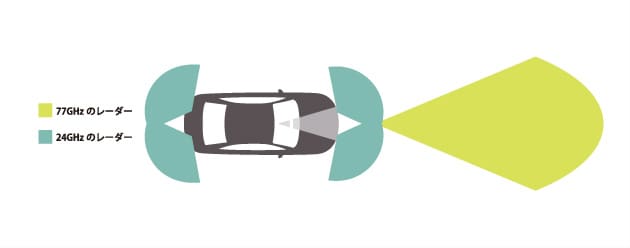 |
レーダーで使うミリ波(波長が数10mm〜1mm)という高い周波数の電波は、低い周波数の電波に比べ、より直線性が増す。このため、クルマの前方を走る対象物を捉える場合には77GHzを使う。クルマの4つのコーナーから死角のクルマを検出する場合には24GHzがよく用いられる(図4)。24GHzのレーダーは周波数が77GHzよりも低いため、近づくクルマの検出範囲が直線的ではなく比較的周囲まで含むようになる。また、周波数が低い方が高価なガリウムひ素やシリコンゲルマのような材料ではなく、シリコンでも動作できるため、コストを下げられるというメリットがある。
4台カメラのサラウンドビュー
サラウンドビューモニターは、クルマの真上からクルマを見て、今どの位置にあるのかを知ることのできる技術で、駐車の際によく使われている。この技術は、4台のカメラで左右前方の映像を映し、その映像をつなぎ合わせて合成し、視点を真上に持ってくるというもの。クルマの映像は、プロセッサによってグラフィックで表示され、視点をいろいろ変えて見ることもできる。
カメラは、CMOSイメージセンサと呼ぶ半導体チップとレンズを組み合わせた超小型のカメラ(スマホに搭載されているカメラと似ている)である。ただ、クルマ用のカメラは、画像処理プロセッサも含めて、感度やS/N比(信号量 (signal) と雑音量 (noise) の比)を向上させていることが多い。例えば、ビル1階の暗いガレージから、外部を見るときは明るすぎて、きれいな映像を見ることができない。そのため、ガレージ内の暗さに合わせた絞りで映像を記録しておき、さらに外の明るさに合わせた絞りで映像を撮り、両者の映像を重ねることでガレージ内も外もくっきり見える画像を映し出す仕組みになっている。スマホ用のカメラにはこういった機能は付いていないことが多い。









-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

