

第3回
安全技術はスマートカーへ拡大、
サイバーテロ対策も必須に
- 2016.09.30

クルマの安全技術の追求は、これから自動運転車が遭遇する問題を洗い出すことでもある。カーエレクトロニクス技術はこれまで、走る、曲がる、停まるに加え、快適運転と安全性も追求してきた。今後の安全性技術は、どのように変わっていくのか。シリーズの連載最終回では、スマートカーに至るためのテクノロジーとその問題、さらには対策を考えていく。
2016年5月にテスラモーターズの電気自動車が、自動運転中に交差点でトラックと衝突事故を起こし、ドライバーが死亡した事故は大きく報道され、自動運転は危ない、というような論調が高まった。右左折してくるクルマと直線走行車との衝突は、従来の衝突防止レーダーでは検出できないため、新たな技術開発が求められている。
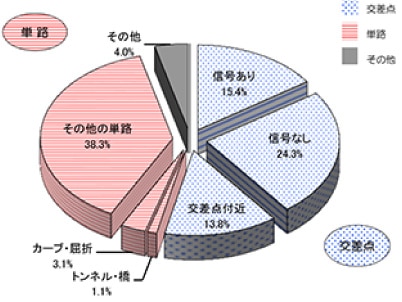
実際、道路の横からの飛び出しや右左折での交差点事故は多い。交通事故総合分析センターが発行するデータを元に三井住友海上が作製したグラフ(図1)によると、平成25年での国内の事故では、交差点での事故が54%も占めている。そのうち、信号のない交差点での事故が全体の24%と多い。横からのクルマの飛び出しが事前にわかれば、事故の減少につながるはずだ。
 |
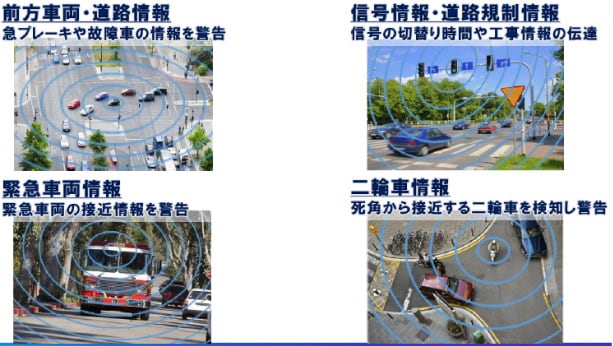
こういった横からの飛び出しに、威力を発揮するテクノロジーがV2V(vehicle to vehicle)あるいはV2I(vehicle to infrastructure)である。V2Vは、クルマ同士が電波を発しながら、互いの位置を知らせたり、追突しないように車間距離を自動的に保ったりする機能である。V2Iは、クルマと交差点との間の通信で、信号のない交差点で車が横からきていることを電波で知らせたり、渋滞情報を知らせたりする。欧州ではすでに実験が始まっており、電波としては無線LANの拡張版であるIEEE 802.11pという規格を使うことが決まっている。この規格はデータ速度こそ遅いが、1km程度まで電波が飛んでいくという特長を持つ。
 |









-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

