

対向車だけをロービームに
クルマのエレクトロニクス化が盛んな欧州や米国では、都市部以外はクルマの走行が少ないため、夜間ではクルマのフロントライトを遠くまで見えるようにするハイビームで走行する。対向車が見えると、光がまぶしいためロービームに落とす。日本では、通常はロービームで、田舎道の対向車のみハイビームにすることが多い。
欧州では、対向車が来ると自動的にロービームに落とすスマートライティングが使われ始めている。また、最近ではハイビームのままでも相手のクルマのドライバーがまぶしく感じないテクノロジーも開発されている(図3)。これは、複数のLEDランプを使ったフロントライトシステムで、車は自動的に対向車を検出し、そこに当たるライトのみをロービームに落とし、それ以外はハイビームのままにしておけるため、遠くまでよく見える。
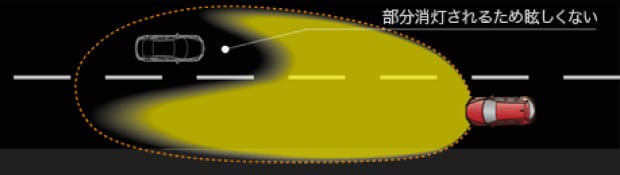 |
この周辺環境の変化に対応できるスマートライティングは、予めビームの横方向の広がりの角度を左右4つ程度のブロックに分けておく。イメージセンサ(カメラ)で対向車を見つけると、その位置がどのビーム角度のブロックに当たるかを見分け、その部分だけをロービームに落とし、対向車以外の前方の風景にはハイビームが当たる仕組みになっている。
動く物体の向きも検出
自動運転や衝突防止機能の実現には、前方の物体がクルマかどうか、さらにはトラックかどうかを見分ける必要があり、そのために、パターン認識技術が欠かせない。人間の目では、すぐに見分けることができても、コンピュータでは画像に映った物体が何なのか、予め登録してある物体と比較して判断しなければならない。このため登録すべき物体のライブラリを持っておく必要がある。しかし、画像は大量に必要で、しかも特徴が一致しなくては判断を下せない。また、物体を認識するだけでなく、どの向きに動いているのかも検出しなければならない。そこで、人工知能(AI)がいきてくる。
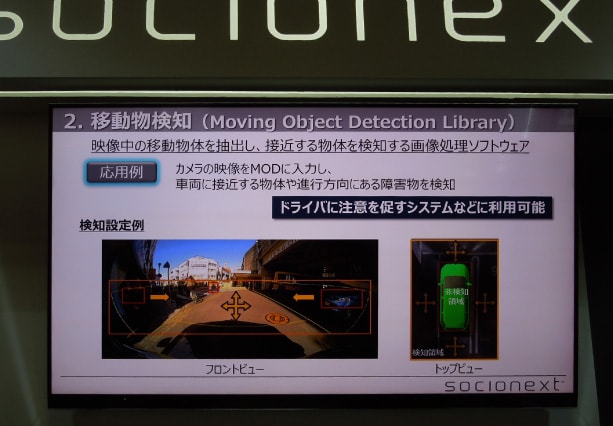 |
AIを利用すれば、例えばトラックならさまざまな種類のトラックの画像を数多く入力し、それをトラックだと学習させる。しかも判断基準は厳密にしない。確率的に80%はトラックだろう、という結論を導ければよいとする。何度も学習させることで、トラックの共通点をAIが覚え、より速く処理できるようになる。しかし、学習させるのに時間がかかりすぎるようだと実用的ではなくなる。いかに短時間で効率的に覚えさせることができるかが、AI導入のカギとなる。
前方の物体がトラックか乗用車か、あるいは人間かを判断できれば、ブレーキをかけるタイミングも正確に見積もることができる。トラックはすぐには止まれない。人間や動物はもっと遅い。加えて、AIをクルマに搭載すべきか、クラウドとして利用するか、という選択肢もある。クルマに搭載するディープラーニング用のプロセッサが高速であればクルマ側で処理できる。半導体メーカーは高速プロセッサを搭載することで対処しようとしているが、クラウド活用のレイテンシ(遅延)が縮まればクラウド利用の可能性も高まるだろう。









-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

