

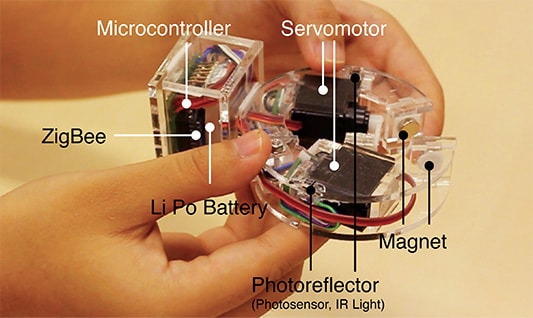
ぬいぐるみの特定の部位を動かすために、杉浦氏が考案したのが、リングの内側に取り付けた2個のサーボモーターでぬいぐるみの布を引っ張るという方法だ。また、リングには、赤外線センサーも内蔵されており、リングからぬいぐるみの手足までの距離を計測することで、関節角度を検出できる。そのため、人間がぬいぐるみの手足を直接動かして、その角度を認識することも可能だ。動作モードとしては、記録・再生モードと同期モードが用意されており、記録・再生モードでは、ユーザーが関節を屈曲させることで動作を記録し、それを再生することができる。同期モードでは、一つのぬいぐるみの関節を屈曲させると、PINOKYを装着した複数のぬいぐるみが同期して動く。さらに、サーバーを経由することで、離れた場所でも動作を同期できるので、ぬいぐるみを介した遠隔地とのコミュニケーションも可能だ。
 |
 |
 |





-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

