

力覚を双方向に伝達するシステム
力覚を記録する次のステップは、力を視覚ではなく、力そのものとして、直接、しかもリアルタイムに人に提示する段階に入る。
視覚的にモノを伝える場合、映像をつかって様々なものを提示できる。しかし、それに対して、力を伝えるということは力覚や触覚に訴えかけることであり、対象は体中にある。映像で提示するよりもはるかにハードルが高く、まだ研究段階ともいえる。
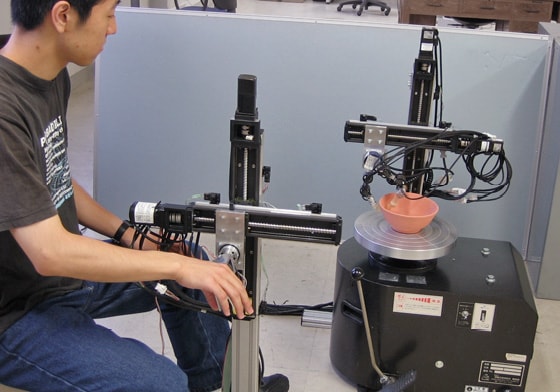
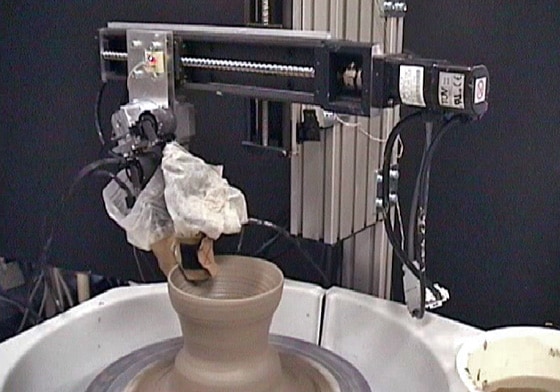
そのなか、先の陶芸力覚の計測を利用して、双方向に力覚を伝達できる陶芸の操作システムが開発されている。マスター・スレーブ型の装置で、マスターロボットとなる操作側と、その操作に従うスレーブロボットとなる動作側に分かれており、手首部分の上下と前後、手首の回転、2指の開閉という4つの可動部をもつ。また、それぞれに力覚センサーが搭載され、ものを持つ力を計測できる。ふたつはネットワークで接続されているので、位置や力の情報を双方向に送受信できる。だからスレーブからマスターへ、力覚をフィードバックさせることも可能。スレーブが粘土に接触したこと、粘土を変形させるときの反力、ろくろの回転による反力の変化、反力のバランスの変化などを、マスター側に送ることができる。それにより、マスター側は、粘土を成形するときの実際の力の抵抗を感じることができるようになるのだ。
マスターからスレーブ、およびスレーブからマスターに伝達される力の大きさや種類、精度などを変化させながら実験を行い、検証をすすめることで、よりリアルな技能データの保存を実現できる。今後、技能体験や技能訓練を行う際の指標として、これらのデータを役立てることが期待される。
 |
 |






-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

