
脳を模したアルゴリズムで、ハエロボットが本当のハエに近づく
2018.3.19
|
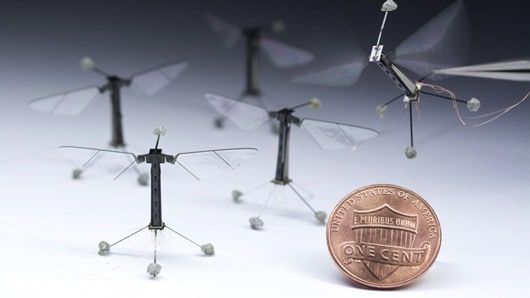
翼長は3cm、重さ80mg、まるで本物の昆虫のように空中でホバリングできる——。実をいうと、そんなロボットはハーバード大学Kevin Ma博士らの研究チームによって2013年にはすでに開発されており、本Science Newsでも紹介している。災害時の被災者探索や、農作物の受粉、セキュリティなど、超小型ロボットの用途は幅広い。
今のところ超小型ハエロボットは動作に必要なバッテリーを本体に内蔵できないため、有線で外部バッテリーに接続されているのだが、実用化に向けてもっと大きい問題がある。それはソフトウェアだ。本物の昆虫のように、風に吹かれても安定した姿勢を保ったり、不安定な場所に着地したりするためには、パソコンで使われているCPU並みの演算能力が必要になるが、それを超小型のボディに収めるのは難しい。
コーネル大学Silvia Ferrari教授らの研究チームは、ハエロボットを本物の昆虫のように振る舞わせるためのアルゴリズムとセンサーの開発にハーバード大学の研究チームと共同で取り組んでいる。
現在、さまざまな研究機関で脳の機能を模したニューロモルフィックチップの開発が進んでいる。フェラーリの研究室のアルゴリズムは、こうしたニューロモルフィックチップに実装することを想定したものだ。周囲の環境の変化に応じて自律的に行動制御を行わせるために、研究チームは物理シミュレータを作成した。その中でハエロボットを飛ばしてリアルタイムに学習を行わせることで、開発のスピードアップを図っている。ニューロモルフィックチップを使って姿勢制御を行うことで、必要な消費電力を大幅に減らせると期待されている。さらに、研究チームでは、カメラ、触覚センサー、毛のような気流センサーをハエロボットに実装することも計画しているという。








-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

