

Google Lunar X PRIZEに参加した経緯
──吉田先生がGLXPに参加するに至った経緯を教えてください。
私は1995年の着任以来、東北大学で宇宙ロボットの研究を行ってきました。小惑星探査機「はやぶさ」のプロジェクトには当初から関わりましたし、その後、超小型衛星の開発も始めました。2009年1月には、50cm角の衛星「雷神」が打ち上げられ、2012年10月には、国際宇宙ステーションから10×10×20cmの衛星「雷鼓」が放出されています。
GLXPが発表されたとき、日本でも「自分たちなら何かできそう」と思った人は少なからずいたでしょう。もちろん、私もその一人です。でも、技術があったとしても、いざ開発に必要な金額を考えると、簡単には手を挙げられません。私自身も含めて、結局は誰も立ち上がりませんでした。
しかしその後、オランダで設立したWLSチームの人達から声をかけられます。ランダーは彼らが作るから、ローバーを担当してくれないかということでした。私はずっと月惑星探査用のローバーを研究してきましたから、それなら協力できます。面白そうだし、参加をすぐに決めました。それが2009年のことです。
──開発しているのはどんなローバーですか?
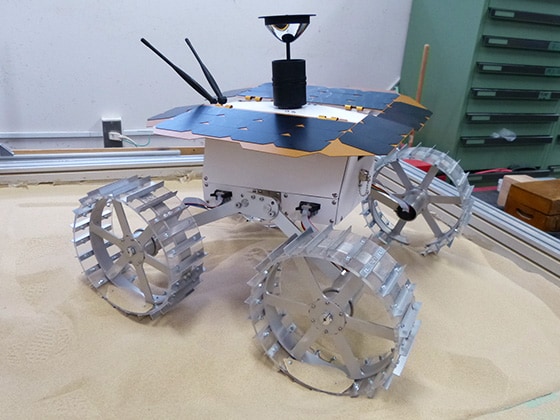
ランダー側との調整で、ローバーの重量は最大10kgと決まりました。その制限にあわせ、我々は地上検証用のプロトタイプとして「ムーンレイカー」を開発。2011年8月には都内で記者会見を開催し、デモンストレーションを行いました。
ムーンレイカーは、コンパクトでシンプルな4輪型のローバーです。走行性能を高くするため、直径20cmと大きな車輪を採用していますが、ランダーへの格納時には車輪を畳んで、小さくなることが可能な設計になっています。カメラは、特殊なミラーを組み合わせた全方位型になっていて、この1台だけで、360度全ての方向を見ることができます。これまで、伊豆大島の裏砂漠などで、何度も走行実験を繰り返してきました。
 |
──ところが今年の1月末に、チーム体制の変更が発表されました。
はい。残念ながら、欧州チームはランダーの開発を断念しました。ですが、我々としては、諦めるつもりは全くありません。そのため、GLXPへの参加権を欧州チームから譲ってもらい、日本チームだけで、WLSの活動を引き継ぐことになりました。チーム代表も、欧州チームのスティーブ・アレン氏から、日本側代表の袴田武史氏に変更されています。
実は「ホワイト・レーベル・スペース」というチーム名も、日本人には意味が分かりにくいということもあって、変更することを検討しています。新しい名称については、今年のどこかのタイミングで発表できると思います。
──まさに"梯子を降ろされた"状態ですが、ランダーはどうする予定ですか?
ランダーを開発する予定だった欧州チームが撤退したため、我々は現在、ローバーだけになってしまいました。ですが、資金的にも技術的にも、今からランダーを開発して、ロケットを用意することは、ほぼ不可能です。
そのため、我々は引き続きローバー開発に専念して、他のチームのランダーに"相乗り"させてもらうことを考えています。協力相手はまだ決まっていませんが、現在、複数の有力チームと交渉中です。相手もローバーを持っていた場合、ローバーが2台乗ることになりますので、成功の確率が高くなります。GLXPは競争なので、1位と2位をどう分け合うか、というようなことも話し合っておく必要がありますが、結果については、今年中には発表できるでしょう。





-
21.3.22
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる

