Science Newsサイエンスニュース
自動運転車を進化させる、古くて新しい「目」
2019.6.24
|
次世代自動車で最も注目されているキーワードが、「自動運転車」ということに誰も異論はないだろう。Googleを始めとするIT企業や、既存の大手自動車メーカー、そしてテスラなどの新興メーカーが、新しい自動車産業の覇権を握ろうと開発にしのぎを削っている。
自動運転車におけるキーは、「目」だ。自動車だけが通行する高速道路での自動運転は、カメラとミリ波を用いたセンサー技術でかなり実用レベルに近づいているが、難しいのは市街地の自動運転である。建物やガードレール、街灯などを元に現在位置を把握し、車体周囲にある物体との距離を数cm単位で正確に計測する必要がある。
自動運転車を開発するほとんどのメーカーではセンサーに「LiDAR」(Laser Imaging Detection and Ranging)を採用している。LiDARは、レーザー光のパルスを周囲に照射して、対象物の距離や性質を正確に分析する。
ただ、LiDARにも短所がある。最大の短所は、コストが高いこと。LiDARは1つあたり100万円〜数百万円のコストがかかる。また、大きな装置を屋根に搭載するため、空気抵抗も大きくなる。
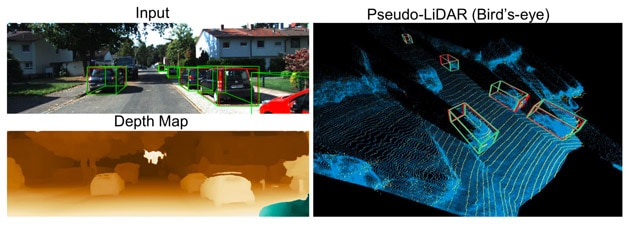
コーネル大学の研究チームが発表したのは、既存の安価なステレオカメラを用いて、LiDAR並みの精度を上げる手法だ。この手法では、フロントガラスの両側に安価なカメラを2台設置し、奥行き情報を含むイメージを取得する。
奥行き情報を使うこと自体は以前から行われてきたが、これまでは物体検出の精度でまったくLiDARにかなわなかった。コーネル大学の研究チームはカメラからの奥行き情報付き画像を、鳥瞰図の点群に変換。これを元に物体検出させることで、従来のカメラを使った手法の3倍、ほぼLiDARと同じ精度を実現することに成功した。
高価なセンサーが、ちょっとした発想の転換によって不要になってしまうこともありえる。自動運転車開発で、ゲームチェンジが起こることになりそうだ。








Science News

-
21.3.22NEW
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる