
No.017
特集:量子コンピュータの実像を探る
連載02
ヒトの能力はどこまで強化・拡張できるのか
Series Report
機械が満たすべき2つの条件
(身体能力を強化・拡張する機械が備えるべき条件)
こうした身体能力を強化・拡張するニーズに応える機械は、以下の2つの条件を満たす必要があるだろう(図3)。
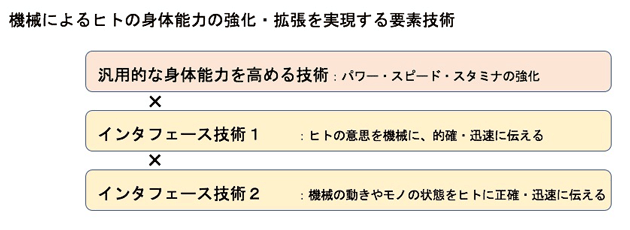 |
1つは、特定の仕事に特化することなく、パワー・スピード・スタミナなど人の身体能力の根本的な部分を向上させる機構を実現すること。ロボットで言えば、同じモノを作り続ける産業用ロボットではなく、人型ロボットのような様々な作業ができる機械である必要がある。電子機器で言えば、ゲーム専用機ではなく、パソコンやスマートフォンのような用途が広い機械でなければならない。
もう1つは、使う人と機械が一体化できる、人馬一体ならぬ“人機一体”が実現することである。特殊な操作スキルの必要なしに、機械による能力の強化・拡張ができることが望ましい。それには、操作者の思い通り自在に機械が動くように、人から機械へと的確・迅速に意思を伝えることができる手段が必要だ。そして逆に、機械がどのように動いているのか人がつぶさに感じることができる、機械から人に状態や状況を伝える手段も欲しい。人間は無意識のうちに、触れたモノが鉄のように硬いか、スポンジのように軟らかいか、風船のように弾力ある物体かといったことを即座に感じ取りながら、行為を柔軟に修正しつつモノを扱っている。同じことが人と機械との間で再現することが、人機一体を実現するための鍵になる。
強化・拡張に向けた要素技術の進化は著しい
人間の身体能力を、強化・拡張できるような理想の機械はまだない。しかし、実現に向けた要素技術が着実に確立されつつあるのは確かだ。人が元々持っている身体能力を活かしながら、機械だけに頼ることなく強化・拡張できる技術が進歩してきている。また、人と機械の一体化を促す技術の進化も著しい。
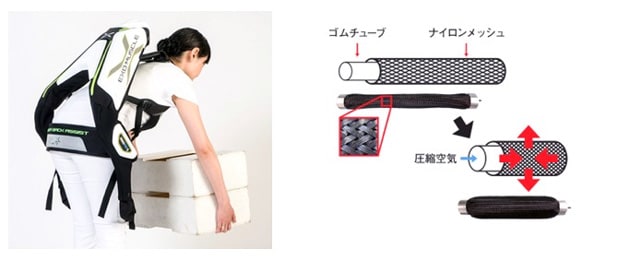
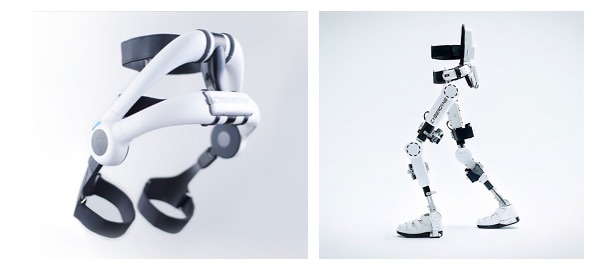
近年、人が身に付けることで身体能力を向上させる、ウエアラブルな機器が数多く登場し、実際に生活や仕事の中で使われるようになってきた。その代表例が、電動アクチュエータや人工筋肉などの動力を用いて人の動きを補助する、外骨格型*1あるいは衣服型のウエアラブル装置、つまりパワードスーツである。パワードスーツは、軽ければ軽いほど扱いやすくなる。軽量化に向けたポイントは、人の動きをアシストする力を生み出すアクチュエータの軽量化である。重い磁石や電線を巻いたコイルで構成されたモーターを動力源にすると、どうしても機器全体が重くなる。そこで、軽量化の実現に向けて注目されている技術が人工筋肉である。
人工筋肉とは、伸縮性のある軽量素材を使って作るアクチュエータである。モーターに代えて利用することで、小型・軽量化できるだけではなく、低電力化、無音化、防水化といったことも可能になる。人工筋肉の具体的なしくみは、圧縮空気をゴムホースに入れて伸縮させるもの、導電性ポリマーに電圧を掛けて伸縮させるもの、カーボンナノチューブに電圧を掛けて伸縮させるもの、形状記憶合金を加熱・冷却して伸縮させるもの、磁性ゲルに磁場を加えてゲルの体積を変化させるものなど様々だ。特に、大きな力を得るために向いているのが、圧縮空気で動かすゴム人工筋肉である。東京理科大学発のベンチャーであるイノフィス、広島大学とダイヤ工業のグループ、東京工業大学のグループなどがゴム人工筋肉を使ったパワードスーツを試作している(図4)。
 |
人機一体に向けて人と機械のつながりを密にする
また、人の意思に連動させて機械を動かす様々な技術も提案されている。例えば、迅速に人の動きに連動させるための手段として、脳から神経を通じて筋肉に伝えられる生体電位信号を皮膚表面から読み取る方法がある。筋肉を動かすための信号に連動するため、あたかも自分の手足のように機械を動かすことができる。これを一歩進めて、脳波を頭の電位や磁気で探るBMI(ブレーン・マシン・インターフェース)の利用も検討されている。BMIについては、連載第3回でさらに詳しく解説したい。一方、過酷な環境で装着するパワードスーツでは、人間の動きをセンサーで直接検知し、これを増幅して機械を駆動する方法を採用する場合が多い。これは、筋電位をパッドで測る方式では、高温下などで汗をかいてパッドがはがれてしまう可能性があるからだ。
そして、機械の動きや触れているモノの感触を、機械を操作する人がリアルに感じることができる技術の開発も、近年急激に進んできた。ここでは、力触覚*2のフィードバック技術が欠かせない。機械の位置と機械がモノに触れることによって発生する力をセンサーで検知し、これを人間の触覚として再現する。この仕組みは、アクチュエータで生み出す振動などを通じて、皮膚の下にある感覚器に訴えることで実現できる。また、機械の動きに応じて、人間の手足の腱を適切に振動させて、手足が動いたり回転したりしているような錯覚を与える試みもある。実際に、この技術を活用して、義手をあたかも自分の手であるかのように感じながら動かすことができるようになってきている。
 |
[ 脚注 ]
- *1
- 外骨格型: 腕や足などサポートする部分を硬いフレームで覆い、体の外側から動きを支援する方式のことを指す。
- *2
- 力触覚: 体がモノに触れた時の感触、体に掛かる圧力や引っ張られる力などを感じる感覚のことを指す。

Expert Interview



Visiting Laboratories



Science News

-
21.3.22NEW
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる