
No.025
特集:テクノロジーの進化がスポーツに変⾰をもたらす。
連載01
ダウンサイジングが進む社会システムの新潮流
Series Report
農機のダウンサイジングとスマート化で社会課題を解決
イギリスのハーパーアダムス大学のエンジニアリング責任者であるサイモン・ブラックモア教授は、こうした農業が本質的に抱えている課題は、「より小さく、よりスマートで、精密な作業が可能な農機を採用することで解決する」と語っている。そして同教授は、農機に自動運転機能を搭載してダウンサイジングし、同時に知能化した農業ロボットを活用した新たな農業のコンセプトを提案(図3)。求められる農業ロボットと、その活用法を研究している。
 |
ブラックモア教授によると、「そもそも、作物を栽培する際に行う作業時間のうち90%は、大型機械によって痛めた農地を修復するために使われている。このため農地を痛めない農機を使えば、農作業は大幅に効率化する」という。先進国では、農業の従事者は減少し、作業効率の向上が課題になっている。農機のダウンサイジングは、人手不足の抜本的な解決策にもなり得るのだ。しかも、自動運転技術によって人手作業自体を削減することができ、電動化によって静音化が実現すれば夜間の自動作業も可能になるだろう。
さらに、農業ロボットを活用すれば、農地や作物の状態をセンサーやドローンなどで検知し、状態や天候に応じて個別にキメ細かな手入れができるようになる。これは、日本の米作り名人など篤農家が、経験を基に手間をかけて行っている作業と同様のものだ。篤農家のような経験やスキルがなくても、ロボットで同様のキメ細かな手入れができれば、世界の農業の生産性は劇的に向上することだろう。これは、人口爆発による食料問題の解決策にもなり得る。
雑草を農薬不要でピンポイント除去
農業にイノベーションをもたらす小型でスマートなロボットを開発する動きは、世界中で見られるようになった。国内外の動きをいくつか紹介したい。
農業用小型ロボットのベンチャー企業であるイギリスのSmall Robot Companyは、多様な農業ロボットを開発し、農家と共同所有する小麦農場で試験運用している(図4)。例えば、「Tom(トム)」と呼ぶロボットは、小麦畑を自律的に走り回り、1日当たり20ヘクタールの農地の一株一株の生育状態を検知して、刈り取り時期を判断するための情報を収集してマッピングする。これによって、実が熟した株だけを選択的に収穫できるようにする。また「Dick(ディック)」と呼ぶロボットは、マッピングデータを基に雑草を見つけて、最大0.5mmの精度で衝撃波を発射し、農薬を使うことなく雑草をピンポイントで除去する。小麦は天候に左右されやすい不安定な作物であり、収入が安定しにくいが、こうした農業用小型ロボットを利用することで、安定的に高い収穫が得られるようになるのだという。
 |
日本には、クボタ、ヤンマー、イセキ農機など世界的農機メーカーが複数ある。日本企業では、まだダウンサイジングやロボット化には至ってはいないものの、農機の自動運転機能を搭載した製品が既に販売されている。そして、着実に多機能化して作業の自動化範囲を拡大し、ロボット化が進んでいる。また、食味・収量センサー付きコンバインも登場しており、これを利用することで刈り取りをしながら収量と食味(タンパク値)を把握するなど、圃(ほ)場ごとの成績を収集することができる。
少子高齢化による建設での人材不足、手作業の自動化が必須
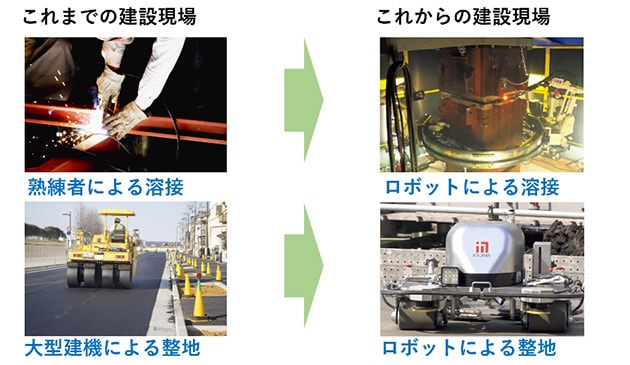
建設業界が作る建物や道路インフラなどは、他産業が作る製品とは比べ物にならないほど巨大である。このため、建機が大型であるのは当たり前のように感じる。しかし、大型建機でできる作業は意外と限られている。整地や基礎づくりなどでは大いに貢献するのだが、骨組みの組み立てや仕上げ、内装工事などには、キメ細かさが求められる作業が莫大にある。このため、ビルの建設現場などには、高度な技能を持つ職人を数多く投入する必要がある。
ところが、日本では少子高齢化による職人の高齢化と、3K職場というイメージも相まって若齢者の入職率の低下が進んでいる。日本建設業連合会の試算では、建設技能労働者は2014年の340万人から、2025年には128万人減り216万人になると予測している。こうした現状を鑑みて、国土交通省は2025年までに建設現場の生産性を20%向上するという目標を掲げている。
建設現場での職人不足は、慢性的な現象である。これまでにも、建設技術や工法の進化による様々な対策が取られてきた。例えば、基礎工程の鉄骨化、ロールマット工法*1による鉄筋の基礎配筋の作業の省力化、プレキャスト*2の利用によるコンクリート打ち込みの簡略化など、人手を減らす工夫が図られてきた。ただし、屋内の設備設置や仕上げ工程の省人化は困難だった。20%の生産性向上という国土交通省の目標のうち、工法や働き方改革の取り組みで改善が見込まれるのは約10%。残りを建設ロボットでまかないたいというのが政府の考えだ(図5)。
 |
[ 脚注 ]
- *1
- ロールマット工法:工場で予め先組しておいたスラブ筋を現場に運んで、そのまま現場に敷設する工法。
- *2
- プレキャスト:工場であらかじめ成形しておいたコンクリート部材を現場に持ち込み敷設する工法。








Science News

-
21.3.22NEW
タンパク質構造予測を可能にするAI

-
21.3.8
ロケットエンジンの課題を解決する「折り紙式」燃料タンク

-
21.2.22
AI顕微鏡は、数分でガン細胞を見つける

-
21.2.8
太陽エネルギーを数ヶ月から数年保存する新素材

-
21.1.26
完全にフラットな⿂眼レンズでカメラが変わる